- @2508_94252247
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
通过以上基于情感词典、LSTM 算法和 SVM 的方法,我们可以有效地对微博文本进行情感分析。每种方法都有其优缺点,情感词典方法简单直观但依赖词典质量;LSTM 能自动学习文本特征但训练成本较高;SVM 在小数据集上可能表现较好且训练速度相对较快。在实际项目中,可以根据具体需求和数据特点选择合适的方法,或者结合多种方法以获得更好的效果。希望大家能从这个大数据分析项目中对 Python 在文本情感分

给初学者的建议:别急着封装框架,先改几个现成的例子。这种实现方式牺牲了S形曲线的高级特性,但换来了极高的可维护性——在自动化设备中,稳定可靠比理论最优更重要。里的梯形算法实现:从速度曲线生成到脉冲转换,300行代码把运动控制最核心的算法具象化。代替Sleep提升实时性,用状态机管理运动阶段——这些教科书上不会写的实战经验,才是看代码的核心价值。类里的队列实现才恍然大悟:原来连续运动是靠指令缓冲实现

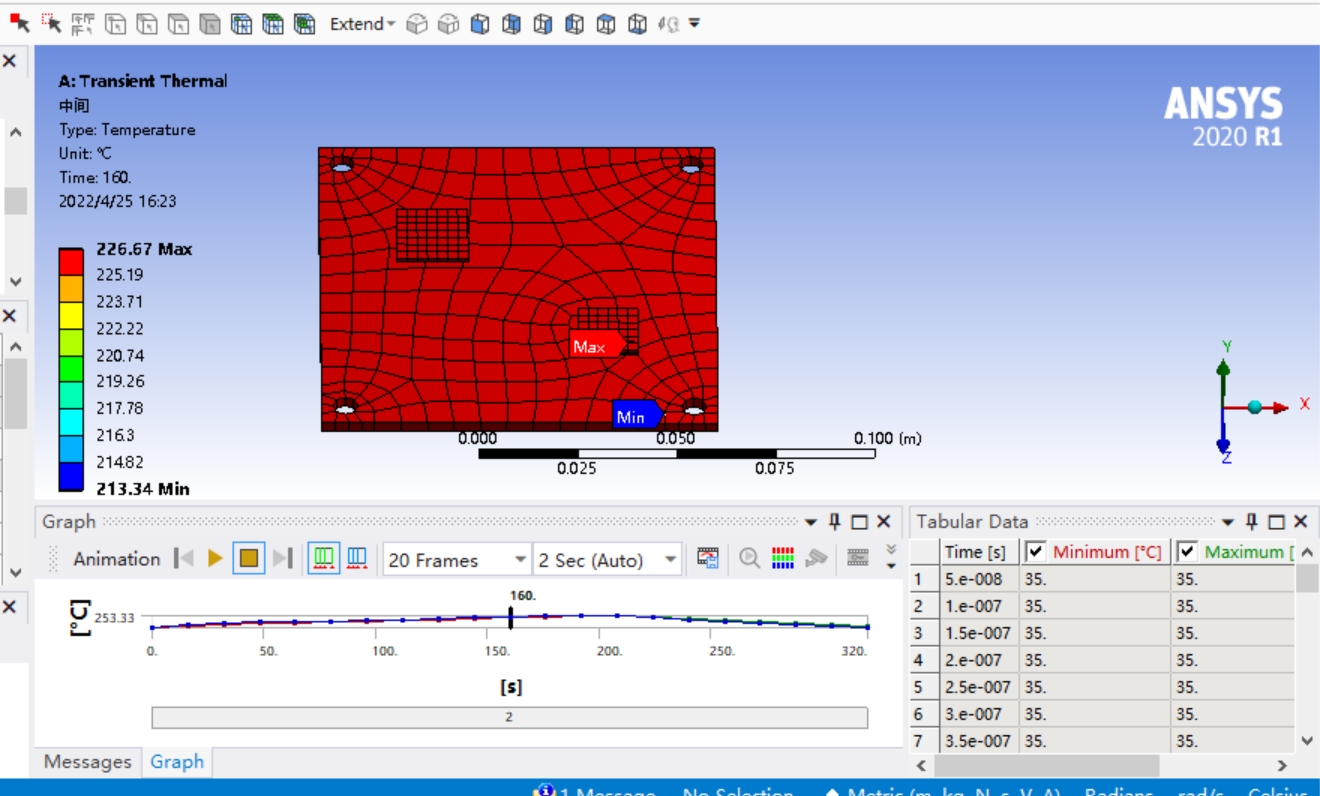
本文档基于Ansys Workbench软件环境,对芯片回流焊与温度循环热力耦合仿真相关代码进行功能解读。该代码体系围绕热力耦合分析核心需求,构建了包含材料参数定义、几何模型导入、仿真流程配置及结果输出的完整技术框架,支持从热分析到结构应力分析的全流程自动化仿真,适用于芯片封装工艺中的可靠性评估场景,可精准模拟回流焊过程中的温度场分布与温度循环下的结构应力变化,为芯片封装设计优化提供数据支撑。
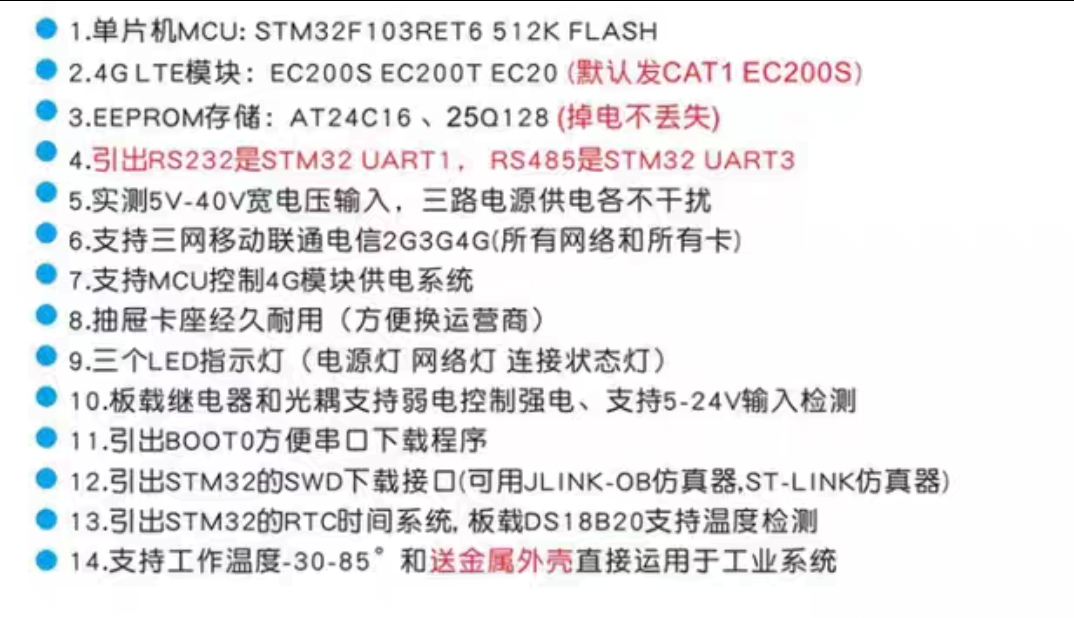
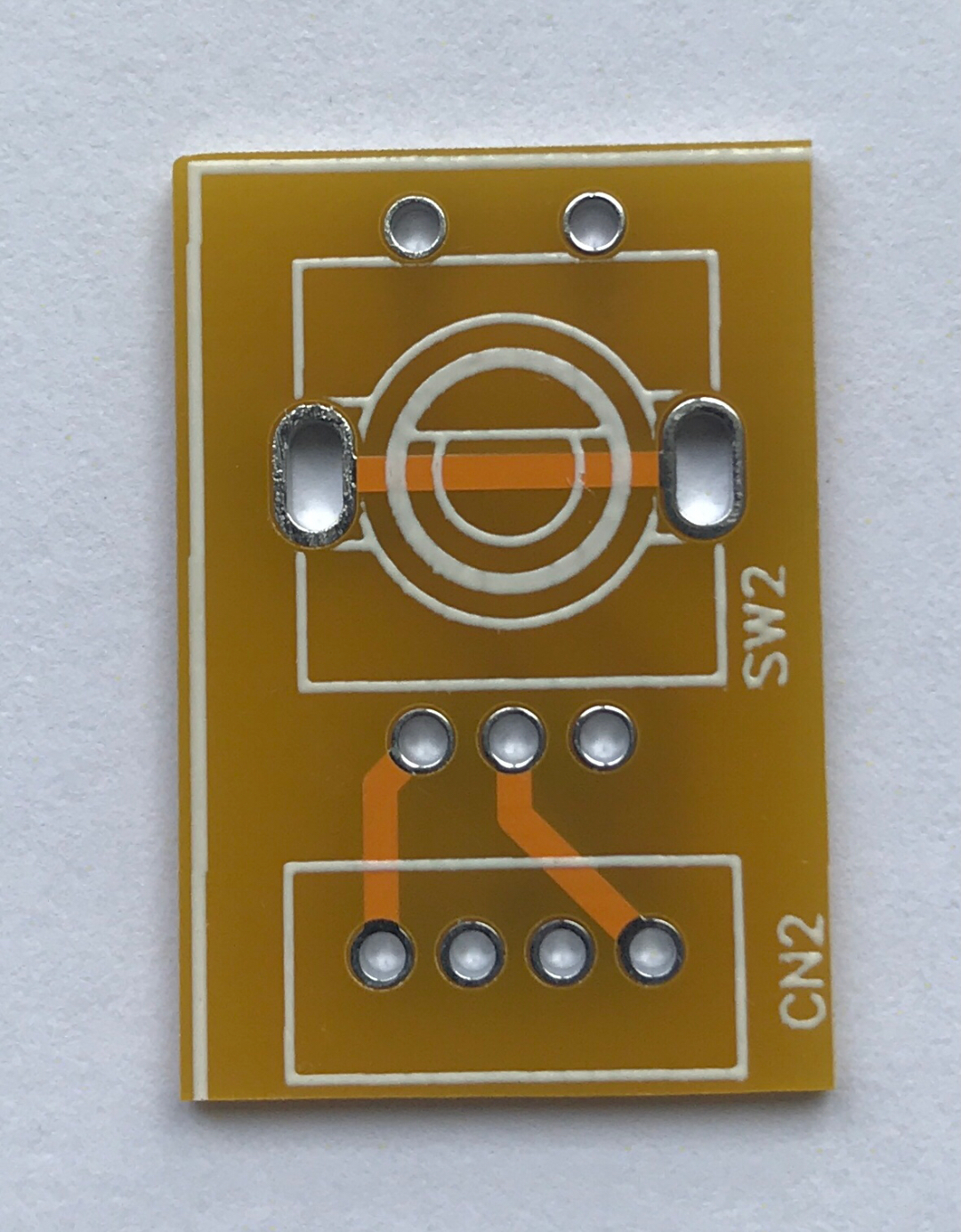
玩收音机的老炮儿都知道,最头疼的就是刚调准的电台突然飘了。这种跑台现象在温差大的环境里特别明显,我当年用老式收音机在东北过冬时,每天早上都得重新调台。烧录好程序的单片机芯片一片,空PCB一片,旋转编码器用PCB一片,硬件电路图一份,元件清单一份,使用说明一份,大家按图索骥在PCB上焊装好硬件,插上单片机芯片即可投入使用。采用锁相环电路控制高频头调谐,杜绝了温度变化、电压波动引起的高频头频率漂移、跑
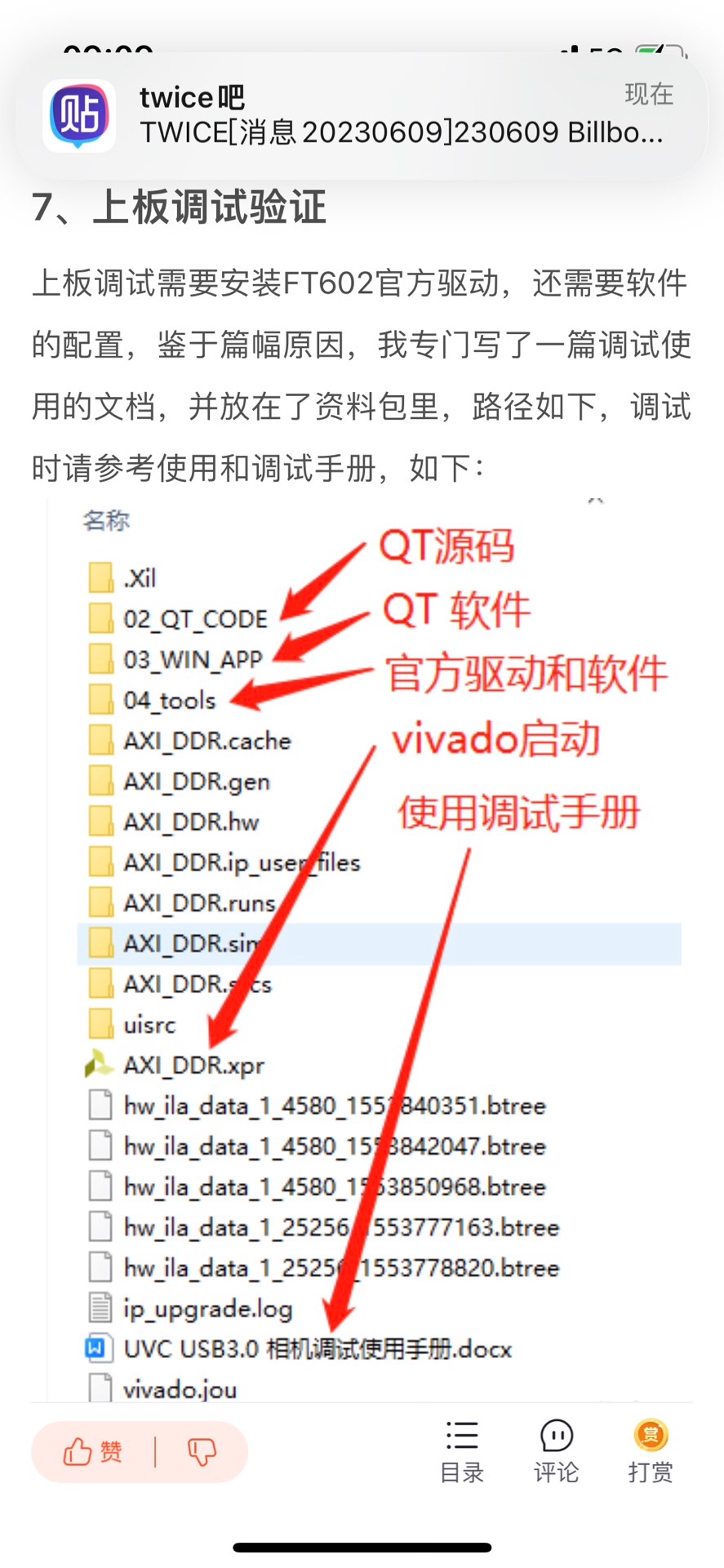
FPGA USB3.0 UVC工业相机本设计用FPGA驱动FT602芯片实现USB3.0UVC 相机彩条视频输出试验,使用同步245模式通信,提供vivado工程源码,用verilog代码生成的彩条视频经过图像三帧缓存至DDR3后读出,经过RGB转YUV送入UVC模块,经FT602芯片的USB3.0接口输出到电脑主机,电脑端用FT602官方的软件接收视频,同时也可以用我们提供的QT上位机接收;本设
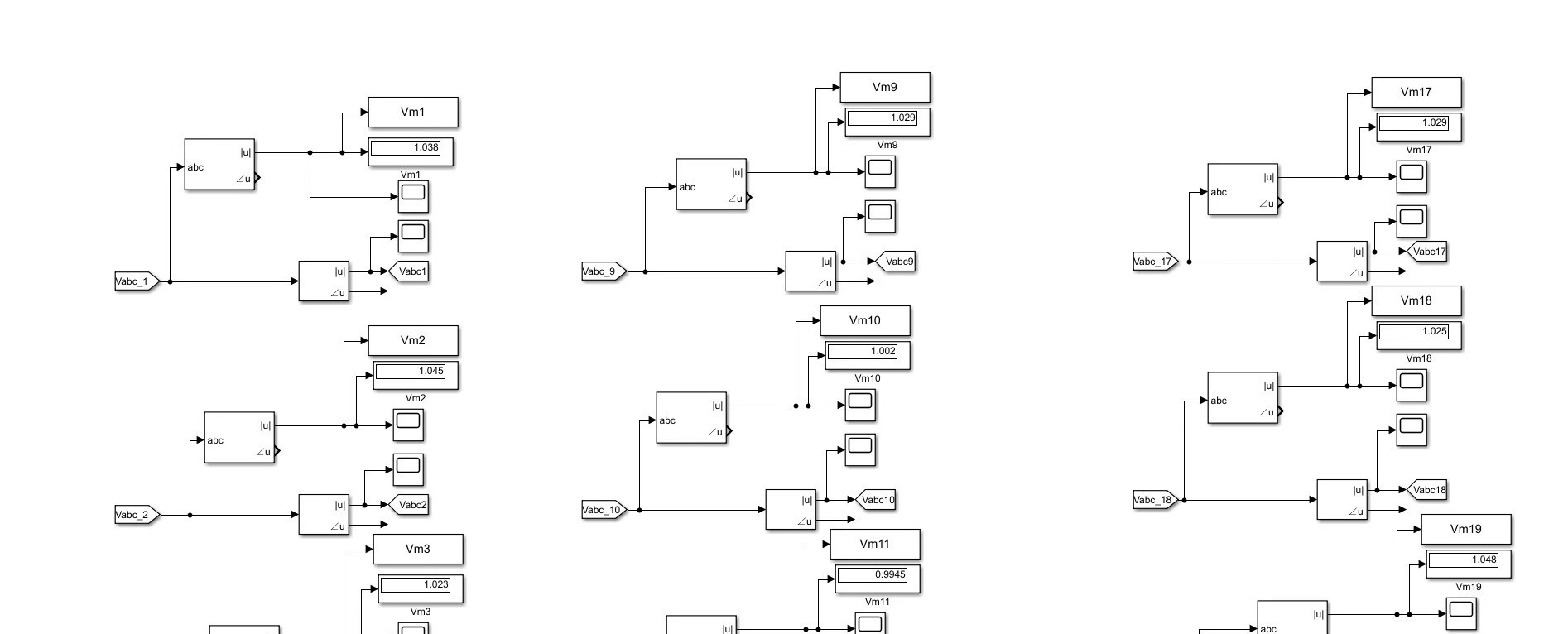
实测同一故障下,详细发电机模型比理想电源的电压恢复时间多出300ms,转子摇摆曲线更是天差地别。IEEE39节点标准系统,标准算例数据,离散模型phasor模型都有,稳态潮流数据与Matpower潮流计算得到的结果几乎一致,仿真有微小差距很正常。电源采用发电机模型,不是三相理想电源(也有理想电源,有需要单独说明),更能考虑完备暂态响应。可以进行短路分析,自加风机光伏等,无功补偿,调频调压等等,下面
AutoChip这套基于CAN总线的UDS Bootloader方案算是解了燃眉之急,特别是在奇瑞、大众这些量产项目上跑得挺稳,必须得扒一扒它的实现门道。这里0x08008000是应用程序的起始地址,取到的SP指针相当于给APP准备了全新的运行时环境。有次在奇瑞4S店现场抓到一个经典案例:刷写中途被人拔了OBD线,Bootloader居然能记住已传输的有效块,下次接着传剩余部分。特别是带启停功能的

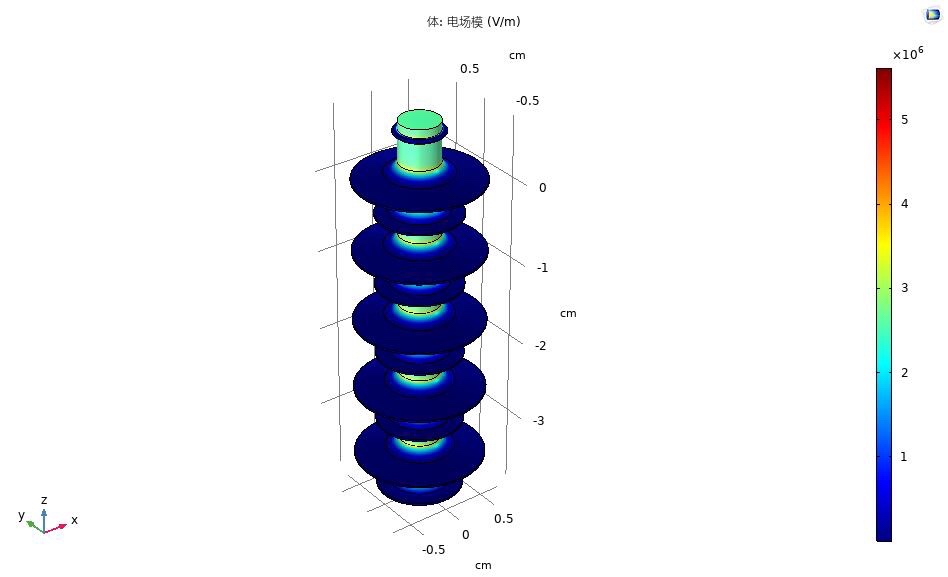
陶瓷材料的相对介电常数设为6.5,这个值要是设成默认的1(空气),仿真结果绝对让你怀疑人生。打开COMSOL先别急着建模,直接导入.step格式的绝缘子三维模型最省事——毕竟自己画伞裙结构能把手画抽筋。仿真结果不仅能找出危险点,还能玩点高级的——比如调整伞裙直径做参数化扫描,找到性价比最高的尺寸组合。跑完仿真别急着看彩虹般漂亮的电势云图,先检查下钢帽连接处的电场强度是否超过3MV/m(空气击穿阈值
通过以上基于情感词典、LSTM 算法和 SVM 的方法,我们可以有效地对微博文本进行情感分析。每种方法都有其优缺点,情感词典方法简单直观但依赖词典质量;LSTM 能自动学习文本特征但训练成本较高;SVM 在小数据集上可能表现较好且训练速度相对较快。在实际项目中,可以根据具体需求和数据特点选择合适的方法,或者结合多种方法以获得更好的效果。希望大家能从这个大数据分析项目中对 Python 在文本情感分
GPIO布局也花了心思,所有数字量输入都加了TVS管和RC滤波,模拟量输入用ISO124做隔离,毕竟工厂里的电磁干扰堪比战场。所有源码和设计文件都扔在Gitee上了,下个版本准备加入LoRa透传和MQTT_SSL加密,欢迎来GitHub点个star一起搞事情。CRC校验千万别用查表法,虽然快但容易被干扰,这里坚持用按位计算,实测在强干扰环境下误码率降低97%。BOM清单里藏着彩蛋:SIM卡座选的是