
写文章




- @2202_75378369
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
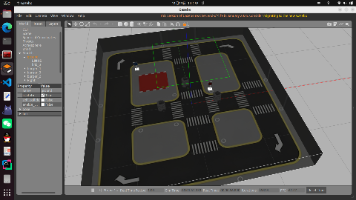
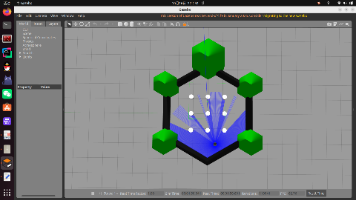
Blender建模在Gazebo中仿真
本文介绍了在TurtleBot3仿真中使用自定义地图的完整流程。通过Blender创建模型并添加地图纹理后,导出为.dae格式,在Gazebo中转换为可用模型。关键步骤包括:导入模型时勾选Static属性防止下坠,修改model.sdf文件确保纹理正确显示,清除默认地面避免穿模问题,最终保存为.world文件。教程还展示了完整的项目文件结构,包含多个路标模型、TurtleBot3机器人模型及世界文
在gazebo仿真场景中添加turtolebot3无人车
本文介绍了在Ubuntu 22.04和ROS2 Humble环境下,使用Gazebo仿真多台TurtleBot3无人车的两种方法。首先详细说明了单台TurtleBot3的安装配置过程,包括环境准备、源码获取、编译和运行。然后重点介绍了两种实现多机器人仿真的方案:方法一通过创建自定义功能包和launch文件实现;方法二则修改了原TurtleBot3的multi_robot.launch.py文件。两
到底了