
基于MCP2515的Linux CAN总线驱动程序设计
MCP2515简介MCP2515是一种独立的CAN总线通信控制器,是Microchip公司首批独立CAN解决方案的升级器件,其传输能力较Microchip公司原有CAN控制器(MCP2510)高两倍,最高通信速率可达到1Mbps。MCP2515能够接收和发送标准数据帧和扩展数据帧以及远程帧,通过两个接收屏蔽寄存器和六个接收过滤寄存器滤除无关报文,从而减轻CPU负担。MCP2515主
MCP2515简介
MCP2515是一种独立的CAN总线通信控制器,是Microchip公司首批独立CAN解决方案的升级器件,其传输能力较Microchip公司原有CAN控制器(MCP2510)高两倍,最高通信速率可达到1Mbps。MCP2515能够接收和发送标准数据帧和扩展数据帧以及远程帧,通过两个接收屏蔽寄存器和六个接收过滤寄存器滤除无关报文,从而减轻CPU负担。
MCP2515主要功能参数及电气特性如下:
(1)支持CAN技术规范2.0A/B, 最高传输速率达到1Mbps;
(2)支持标准数据帧、扩展数据帧和远程帧,每帧数据域长度可为0~8个字节;
(3)内含两个的接收缓冲器和三个发送缓冲器,并且可编程设定优先级;
(4)内含六个29位(bit)的接收过滤寄存器和两个29位(bit)的接收屏蔽寄存器;
(5)高速SPI接口,支持SPI 0,0和1,1模式;
(6)一次性模式可确保报文被一次性传输;
(7)具有可编程时钟脉冲输出引脚,可作为其他芯片时钟信号源;
(8) 帧起始(SOF)信号输出功能可被用于在确定的系统中(如时间触发CAN-TTCAN)执行时隙功能,或在CAN总线诊断中决定早期总线出级;
(9) 采用低功耗CMOS技术,工作电压:2.7V~5.5V, 工作电流:5mA(待机状态1μA);
(10)工作温度范围:(I)-40℃到+85℃,(E)-40℃到+125℃。
MCP2515 Socket CAN驱动实现
内核中为MCP2515提供了Socket CAN驱动程序,我们只需为MCP2515芯片配置内核选项就可以使用Socket编程的方式使用MCP2515 CAN总线。
Socket CAN介绍
Socket CAN是在Linux下CAN协议实现的一种实现方法。Linux下最早使用CAN的方法是基于字符设备来实现的,与之不同的是Socket CAN使用伯克利的Socket接口和Linux网络协议栈,这种方法使得CAN设备驱动可以通过网络接口来调用。Socket CAN的接口被设计的尽量接近TCP/IP的协议,让那些熟悉网络编程的程序员能够比较容易的学习和使用。
向Linux内核注册MCP2515驱动
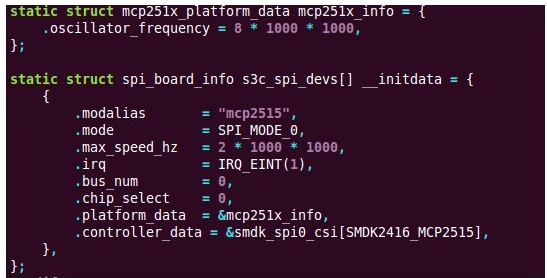
向Linux内核添加SPI驱动在之前的文章已经有详细的介绍,根据硬件原理图图3所示,MCP2515挂在SPI0上,使用中断GPF1,所以要向Linux内核注册MCP2515设备,
注册完成,执行make menuconfig配置内核选项。
1 [*]Networking support->
2 <*>CAN bus subsystem support->
3 <*>Raw CAN Protocal
4 <*>Broadcast Manage CAN Protocal
5 CAN Device Drivers->
6 <*>Platform CAN driver with Netlink support
7 [*]CAN bit-timing calculation
8 <*>Microchip MCP251x SPI CAN controllers
9
10 Device drivers->
11 [*]SPI support ->
12 <*> Samsung S3C2416 series type SPI
编译内核,内核启动如图显示即说明MCP2515驱动加载成功。

Socket CAN测试
因为最新版BusyBox对Socket CAN的不支持,所以为了测试和使用Socket CAN,我们需要自己编译Socket CAN的工具。这里介绍两个工具,分别是iproute2 和 canutils。
1 iproute2
(1)下载iproute2的最新源码http://www.kernel.org/pub/linux/utils/net/iproute2/ 。笔者下载的是iproute2 3.6.0。
(2)解压iproute2-3.6.0.tar.xz,修改Makefile第33行。
33 #CC = gcc
34 CC = arm-none-linux-gnueabi-gcc
(3)因为我们只需要iprout2的ip命令,所以修改Makefile的第42行。
42 #SUBDIRS=lib ip tc bridge misc netem genl man
43 SUBDIRS=lib ip
(4)修改完成执行make命令,生成ip命令,拷贝到开发板文件系统目录。
(5)使用ip命令。
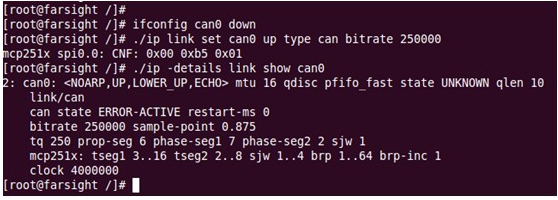
ifconfig can0 down //关闭can0,以便配置
./ip link set can0 up type can bitrate 250000 //设置can0波特率
./ip -details link show can0 //显示can0信息
2 canutils
Canutils是基于GNU GPLv2许可的开源代码,包括canconfig、canecho、cansend、candump、cansequence五个工具,用于检测和监控Socket CAN接口。
(1)下载canutils的最新源码http://www.pengutronix.de/software/socket-can/download/canutils 。笔者下载的是canutils 4.0.6。
(2)因为canutils编译需要libsocketcan库的支持,需要下载libsocketcan。http://www.pengutronix.de/software/libsocketcan/download/ 笔者下载的是libsocketcan 0.0.9。
(3)解压libsocketcan-0.0.9.tar.bz2。执行configure命令。(其中--host是指定交叉工具链,--prefix是指定库的生成位置)
./configure --host=arm-none-linux-gnueabi --prefix=/home/linux/workdir/can/tools/libsocketcan
(4)执行make编译库;
(5)执行make install 生成库。至此,libsocketcan编译完毕。
(6)解压canutils-4.0.6.tar.bz2,执行configure命令。(其中--host是指定交叉工具链,--prefix是指定库的生成位置,libsocketcan_LIBS是指定canconfig需要链接的库,LDFLAGS是指定外部库的路径,CPPFLAGS是指定外部头文件的路径)
./configure --host=arm-none-linux-gnueabi --prefix=/home/linux/workdir/can/tools/canutils libsocketcan_LIBS=-lsocketcan LDFLAGS=-L/home/linux/workdir/can/tools/socketcan/lib CPPFLAGS=-I/home/linux/workdir/can/tools/socketcan/include
(7)修改完成执行make命令,生成四个目录,分别拷贝到开发板文件系统的相应目录。
(8)使用canutils工具。(可以使用[命令 + --help]的方式来查看命令的详细用法,下面只介绍一些常用的指令)
① 配置CAN的总线通讯波特率:
canconfig canX bitrate + 波特率

② 开启 / 重启 / 关闭CAN总线
canconfig canX start
canconfig canX restart
canconfig canX stop
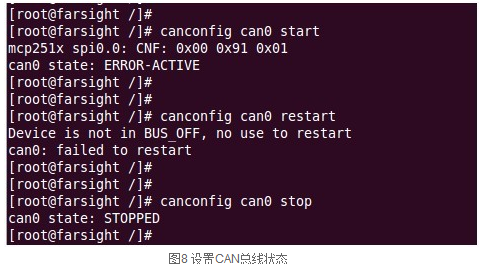
③ 查看CAN总线状态
canecho canX

④ 发送信息
cansend canX –-identifier=ID + 数据

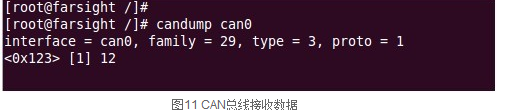
⑤ 接收数据
candump canX
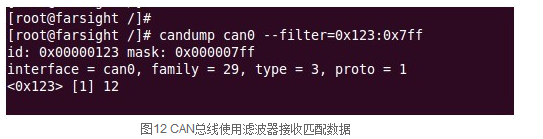
⑥ 使用滤波器接收ID匹配的数据
candump canX –-filter=ID:mask
更多推荐
 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)