
《创客学院嵌入式从入门到精通》笔记--10全面掌握嵌入式系统移植
嵌入式系统移植-01嵌入式基本概念,嵌入式开发环境搭建,目标机搭建,TFTP服务搭建,NFS服务搭建系统移植概述及环境搭建通用嵌入式系统软件组成部分无os嵌入式系统组成图有os嵌入式系统组成图Linux 在嵌入式中应用的条件与前景嵌入式系统越来越追求数字化、网络化和智能化。这就要要求整个嵌入式系统必须是开放的、提供标准的API,并且能够方便地与众多第三方的软硬件沟通。Linux是在GPL协议下开放
目录
01嵌入式基本概念,嵌入式开发环境搭建,目标机搭建,TFTP服务搭建,NFS服务搭建
02Bootloader移植(bootloader基本概念,U-boot常用命令和配置编译
3.saveenv 将当前定义的所有的环境变量值存入flash中
10.bootm kernel-addr ramdisk-addr dtb-addr
04Linux内核分析(Linux内核基本概念,Linux内核启动分析,Linux内核调试方法)
06第三方驱动移植(驱动编译进内核Makefile,图像化配置Kconfig,驱动模块,黑白盒对比)
2.2改Makefile让驱动编译进内核(同步修改,对应目录下的Makefile)
2.4编译并拷贝至根文件系统2.5在开发板上运行该测试程序分析这个打印信息的来源3.需要创建设备文件
07植根文件系统制作(根文件系统基本概念,根文件系统设备,访问根文件系统制作)
01嵌入式基本概念,嵌入式开发环境搭建,目标机搭建,TFTP服务搭建,NFS服务搭建
1.系统移植概述及环境搭建
1.通用嵌入式系统软件组成部分
- 无os嵌入式系统组成图

- 有os嵌入式系统组成图

2.Linux 在嵌入式中应用的条件与前景
嵌入式系统越来越追求数字化、网络化和智能化。这就要要求整个嵌入式系统必须是开放的、提供标准的API,并且能够方便地与众多第三方的软硬件沟通。
Linux是在GPL协议下开放源码的系统,内核可以定制剪裁、功能强大、支持多种文件系统、网络功能及其强大、非常适合高端嵌入式系统。
更重要的是 linux 不仅仅支持X86体系结构的cpu,还支持众多的体系结构的 cpu/mcu。
Android 系统最初就是基于linux-2.6.23的。硬件基本要求 armv5 ARM926EJ-S 200Mhz 64M
3.嵌入式Linux内核结构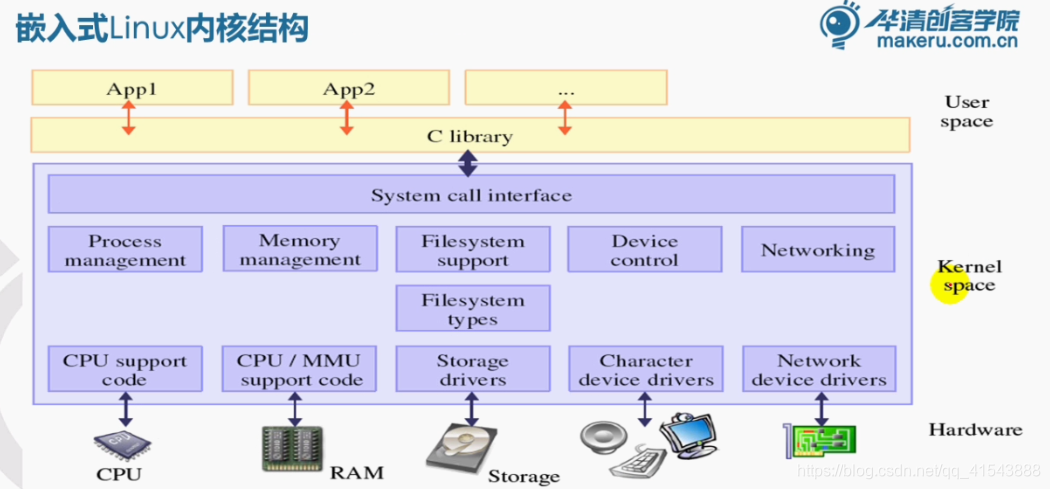
4.Android系统

2.嵌入式开发环境搭建
1.嵌入式Linux交叉开发环境硬件基本组成
- 开发主机(Host)
- 目标机(Target)
- 连接介质



2.开发板启动流程

3.搭建嵌入式Linux开发环境的主要工作
- 准备开发主机、目标机(开发板)以及二者的连接介质
- 准备目标机代码
- 安装交叉工具链
- 开发主机上安装的软件(为方便调试)
- 终端软件(putty、minicom)
- tftp服务
- nfs服务
- 目标机安装(u-boot烧写调试)SD卡方式 Fastboot方式 (成功后,板子有串口信息输出)
- 主机和目标机能联通
- 网络自动 tftp 加载内核,并挂载nfs rootfs 启动
4.开发主机搭建

5.TFTP 服务



6.NFS 服务


![]()
7.目标机安装(u-boot烧写调试) – 需要SD卡
制作SD卡,并从SD卡启动 (使用的是2010版本u-boot,支持fastboot烧写的)
将sdfuse_q 拷贝到Linux下
将SD卡插入电脑并识别
进入sdfuse_q执行如下操作
$ sudo ./mkuboot.sh /dev/sdb
出现下面的信息,表示SD启动盘制作成功
Fuse FS4412 trustzone uboot file into SD card
/dev/sdb reader is identified.
u-boot-fs4412.bin fusing...
1029+1 records in
1029+1 records out
527104 bytes (527 kB) copied, 5.31834 s, 99.1 kB/s
u-boot-fs4412.bin image has been fused successfully.
Eject SD card
关闭开发板电源,将拨码开关SW1调至(1000)(SD启动模式)
刚才做好的SD启动盘插入SD卡插槽
打开电源
8.fastboot烧写
连接USB线到板子上的USB OTG口
连接串口线到板子的COM2口
重启板子,并快速停下,在串口终端输入下面命令 /*
如果有有需要,可以格式化 eMMC 并创建分区
$ fdisk -c 0
$ fatformat mmc 0:1
$ ext3format mmc 0:2
$ ext3format mmc 0:3
$ ext3format mmc 0:4
*/
$ reset 重启切换到2010版的sd卡启动
$ fastboot //会提示装驱动,选中第一天_环境搭建里的fastboot_driver 安装
打开dos终端 进入USB_fastboot_tool\platform-tools目录输入
> fastboot.exe flash bootloader u-boot-fs4412.bin /*
同理可以烧录其它镜像
> fastboot.exe flash kernel zImage
> fastboot.exe flash ramdisk ramdisk-uboot.img
> fastboot.exe flash system system.img
> fastboot -w
*/
关闭开发板电源,将拨码开关SW1调至0110(EMMC启动模式)后打开电源
从flash 的u-boot启动 /*
如果启动失败,可以通过拨号开关恢复到SD卡方式启动
如果启动成功,想恢复到原来的u-boot启动 (第一次输入reset后会自动切换回去,不用拔拨号开关)
*/
板子能ping通虚拟机 (要关闭防火墙 网卡右键高级)
|板子 192.168.2.10 |
--------------------------
------------------------
|电脑 192.168.2.112 | //做中转用,和板子虚拟机IP要在同一网段, 且不能和它们IP一样
------------------------
------------------------
|虚拟机 192.168.2.231 |
设置电脑网卡ip 为192.168.2.112 255.255.255.0 192.168.9.1
启动板子,快速按任意键停在boot处,设置u-boot 的环境变量
#setenv serverip 192.168.2.231 //注意它与虚拟机里 ubuntu 的ip要一致
#setenv ipaddr 192.168.2.10
#setenv gatewayip 192.168.2.1
#pri 查看设置后效果
FS4412 # pri
baudrate=115200
bootargs=root=/dev/nfs nfsroot=192.168.9.120:/nfs/rootfs rw console=ttySAC2,115200 clk_ignore_unused init=/linuxrc ip=192.168.9.9
bootcmd=tftp 41000000 uImage;tftp 42000000 exynos4412-fs4412.dtb;bootm 41000000 - 42000000
bootdelay=3
ethact=dm9000
ethaddr=11:22:33:44:55:66
gatewayip=192.168.2.1
ipaddr =192.168.2.10
netmask=255.255.255.0
serverip=192.168.2.231
#ping 192.168.2.231
测试网络是否连通 ,注意在u-boot中, 它能ping电脑, 电脑不能ping它 ,注意,要拔掉jtag线,否则ping 会重启
host 192.168.2.231 is alive //is alive 表示ok
编辑 -> 虚拟网络编辑器 -> VMnet0 桥接到(选连板子的网卡) //注意不要用automic,应手动指定对应的网卡
虚拟机 -> 设置 -> 网卡适配器 -> 自定义 (选 VMnet0)
使虚拟机内的虚拟网卡,关联到电脑实际用到的网卡
通过选VMnet0 和 VMnet1 。实现连板子,还是上internet的切换
网络自动 tftp 加载内核,并挂载nfs rootfs 启动
-
设置tftp方式加载内核
setenv bootcmd tftp 41000000 uImage;tftp 42000000 exynos4412-origen.dtb;bootm 41000000 - 42000000
setenv bootcmd 设置环境变量(自启动命令 bootcmd)
tftp 41000000 uImage; 通过tftp从虚拟机/tftpboot目录下下载内核uImage到板子的内存 41000000 处。 ; 用于分割多个命令
tftp 42000000 exynos4412-origen.dtb 通过tftp下载设备树文件 exynos4412-fs4412.dtb 到板子的内存 42000000 处
bootm 41000000 - 42000000 启动内核(41000000处放的是内核uImage, 42000000处放的是设备树文件) -
挂载nfs rootfs
setenv bootargs root=/dev/nfs nfsroot=192.168.2.231:/nfs/rootfs rw console=ttySAC2,115200 clk_ignore_unused init=/linuxrc ip=192.168.2.10setenv bootarg 设置环境变量( bootarg是启动参数)
root=/dev/nfs 指定根文件系统类型是 nfs
nfsroot=192.168.2.231:/source/rootfs 指定source rootfs的位置 (是在ip 是192.168.2.231的机器上 ,的/source/rootfs目录下). 注意/nfs/rootfs必须和前面NFS服务配置文件设置一致 -
savenenv //保存环境变量
掉电重启动板子 看能否挂载nfs rootfs成功
能看到下面信息表示成功
[root@farsight ]# ls
etc linuxrc proc sbin tmp var
bin dev lib mnt root sys usr
在里面创建文件,电脑的/nfs/rootfs上同步变化
02Bootloader移植(bootloader基本概念,U-boot常用命令和配置编译
1.Bootloader 介绍
1.什么是Bootloader
- Bootloader是硬件启动的引导程序,是运行操作系统的前提;
- 在操作系统内核或用户应用程序运行之前运行的一小段代码。对软硬件进行相应的初始化和设定,为最终运行操作系统准备好环境;
- 在嵌入式系统中,整个系统的启动加载任务通常由Bootloader来完成。
2.Bootloader的特点
- Bootloader不属于操作系统,一般采用汇编语言和C语言开发。需要针对特定的硬件平台编写。
- 在移植系统时,首先为开发板移植Bootloader。
- Bootloader不但依赖于CPU的体系结构,而且依赖于嵌入式系统板级设备的配置。
3.Bootloader的操作模式
- 自启动模式:在这种模式下,Bootloader从目标机上的某个固态存储设备上将操作系统加载到RAM中运行,整个过程并没有用户的介入。
- 交互模式:在这种模式下,目标机上的Bootloader将通过串口或网络等通信手段从开发主机(Host)上下载内核映像和根文件系统映像等到RAM中。可以被 Bootloader写到目标机上的固态存储媒质中,或者直接进行系统的引导。也可以通过串口接收用户的命令。
2.常用bootloader介绍

3.U-boot介绍
u-boot(Universal Boot Loader)是德国DENX小组开发的用于多种嵌入式CPU的bootloader程序。遵循GPL条款。
从FADSROM、8xxROM 、PPCBOOT、Armboot逐步发展演化而来;
当前版本号:参考Makefile。
http://www.denx.de/wiki/U-Boot/WebHome
U-boot的特点:
代码结构清晰、易于移植(见目录结构)
支持多种处理器体系结构(见arch目录)
支持众多开发板(目前官方包中有200多种,见board目录)
命令丰富、有监控功能
支持网络协议、USB、SD等多种协议和设备
支持文件系统
更新较活跃,使用者多,有助于解决问题
4.U-boot命令介绍
命令分类
环境设置、数据传输、存储器访问、加载运行
1.printenv 显示所有环境变量
ORIGEN # pri

2.setenv 设置新的环境变量
ORIGEN # set myboard FS4412
ORIGEN # pri

3.saveenv 将当前定义的所有的环境变量值存入flash中

4.tftp 通过网络下载程序
U-boot # setenv ethaddr 11:22:33:44:55:66 //设置开发板的物理地址

U-boot # setenv ipaddr 192.168.2.10
U-boot # setenv serverip 192.168.2.231
U-boot # tftp 41000000 application.bin
U-boot # tftp 41000000 zImage
5.protect 对Nor Flash写保护
protect on 0 10000 对区间[0x0, 0x10000]进行写保护
protect off 0 10000 对上述区间取消写保护
6.erase 擦除Nor FLASH
erase all 擦除FLASH所有的扇区
erase 0 10000 把FLASH区间 [0x0, 0x10000]擦除
7.Nand相关命令
nand read addr off size
nand write addr off size
nand erase [clean] [off size]
NAND flash和NOR flash的区别详解 https://zhidao.baidu.com/question/1993729068599410707.html
NAND flash按块访问和NOR flash按字节访问
NAND flash必须先擦出后写
8.movi 命令
eMMC
movi init —初始化eMMC并显示相关信息
movi read u-boot/kernel addr //读u-boot或读kernel,可以选择
movi write u-boot/kernel addr
movi read rootfs addr size
movi write rootfs addr size
9.bootcmd 自启动命令
如果定义了该变量,在自启动模式下将会执行该环境变量中的命令。
将文件通过tftp自动下载到指定的地址
U-boot # setenv bootcmd tftp 41000000 uImage; bootm 41000000
U-boot # saveenv
bootargs 是uboot传递给内核到启动参数,是一个字符串
console=xxx: 告诉内核启动时候到调试信息是从哪个设备输出,这里是串口2
init=xxx: 告诉内核linux到第一个用户进程是什么
root=xxx : 告诉内核根文件系统在哪里
root=/dev/nfs 表示根文件系统在网路远端
nfsroot=(开发板)ip:path rw 其中rw表示可读可写
ip=xxx :(Ubuntu ip)告诉内核开机的时候内核的ip地址是多少(静态分配ip)

10.bootm kernel-addr ramdisk-addr dtb-addr
引导内核为内核传参,其中内核和ramdisk通常为mkimage处理过的二进制文件。
从这个地址处自动启动程序
11.go addr
执行内存中的二进制代码,简单的跳转到指定地址(运行裸机程序)
5.U-BOOT 配置编译
1.U-Boot目录结构
- 平台相关
arch, board, include… - 平台无关
common, net, fs, drivers… - 工具和文档
tools, doc
2.编译U-boot
- U-boot的编译
整个工程通过Makefile来组织编译。顶层目录下的Makefile中包含了开发板的配置信息。从顶层目录开始递归地调用各级子目录下的Makefile,最后链接成u-boot映像。 - 顶层目录下的 Makefile
它负责u-boot整体配置和编译
在Makefile中指定使用的交叉工具链
配置u-boot: make origen_config
编译: make
linux@linux:~/u-boot-2013.01-fs4412$ ./build.sh
#!/bin/sh
sec_path="CodeSign4SecureBoot/"
CPU_JOB_NUM=$(grep processor /proc/cpuinfo | awk '{field=$NF};END{print field+1}')
ROOT_DIR=$(pwd)
CUR_DIR=${ROOT_DIR##*/}
case "$1" in
clean)
echo make clean
make mrproper
;;
*)
if [ ! -d $sec_path ]
then
echo "**********************************************"
echo "[ERR]please get the CodeSign4SecureBoot first"
echo "**********************************************"
return
fi
make fs4412_config
make -j$CPU_JOB_NUM
if [ ! -f checksum_bl2_14k.bin ]
then
echo "!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"
echo "There are some error(s) while building uboot, please use command make to check."
echo "!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"
exit 0
fi
cp -rf checksum_bl2_14k.bin $sec_path
cp -rf u-boot.bin $sec_path
rm checksum_bl2_14k.bin
cd $sec_path
cat E4412_N.bl1.SCP2G.bin bl2.bin all00_padding.bin u-boot.bin tzsw_SMDK4412_SCP_2GB.bin > u-boot-fs4412.bin
mv u-boot-fs4412.bin $ROOT_DIR
rm checksum_bl2_14k.bin
rm u-boot.bin
echo
echo
;;
esac
U-BOOT编译生成的映像文件

3.U-boot镜像下载烧录
烧录编译产生的镜像 u-boot.bin
初次或开发板代码损坏不能正常启动时,可采用JTAG工具烧录
专用的烧录工具如h-jtag或DNW等
在u-boot已经能工作,升级或修正U-boot时,可用U-boot中的命令来烧录
其它方式 如SD卡 , Fastboot命令
镜像固化位置
ROM、NOR FLASH、NAND FLASH EMMC等
- u-boot.bin是uboot编译源码后直接产生的,一般的的开发板,直接烧写这个文件就可以了
- 但是三星的cortex_a9 exynos4412这款CPU把uboot中一些初始化时钟等的代码剥离出去了,所以,编译好的这个u-boot.bin还要加上被剥离出去的部分,才可以正常使用
- 所以在build.sh脚本文件中,在u-boot.bin之前加上了剥离出去的部分后,生成了u-boot-fs4412.bin

03U-boot启动流程, U-boot移植
1.U-BOOT 启动流程
1.1u-boot启动三个2
-
两个阶段:汇编阶段(特殊功能寄存器C语言不能直接访问,C运行之前需要准备堆栈),C阶段
-
两次搬移:u-boot自搬移,内核搬移
-
两次初始化:基本硬件初始化,大部分硬件初始化
第一条指令位置(参考u-boot.map) arch/arm/cpu/armv7/start.S 里的 _start: b reset 设置为SVC模式 msr cpsr,r0 关闭MMU Cache cpu_init_cp15 基本硬件设备初始化 board/samsung/fs4412/lowlevel_init.S 的 lowlevel_init 关中断 看门狗(时钟 串口,flash,内存等的初始化时间可能比较长,这样的话,看门狗会使开发板不停的重启,所以在初始化硬件之前,先关闭MMU Cache,关中断 看门狗) ,初始化时钟 串口,flash,内存 自搬移到内存 relocate_code (把u-boot剩下的部分搬到内存中,然后运行) 设置栈, IRQ stack frame (C代码运行之前,必须先设置栈) 准备进入C部分 bl _main ( 参u-boot.map ) 大部分硬件初始化 arch\arm\lib\board.c\board_init_f 里的init_sequence 搬移内核到内存运行 common/main.c main_loop -> getenv ("bootcmd") bootdelay >= 0 && s && !abortboot (bootdelay)) 下的 run_command (bootcmd)
发板上的EMMC里面,开发板上电后,BootLoader运行,
设置为SVC模式,关闭MMUCache,基本硬件初始化,
自搬移到内存(uboot剩余程序进内存),设置栈,准备进入C语言部分,
大部分硬件初始化,搬移内核到内存(通过网络—tftp服务,将uImage和设备树文件加载到内存)
挂载根文件系统(通过网络—nfs服务,将rootfs加载到内存)
1.2启动步骤(重点)
- 上电启动bootloader
硬件基本初始化
自搬移到内存
搬移内核到内存
传递内核启动参数(parmer_struct 或taglist) - 加载内核
a. 自解压内核 decompess //arch/arm/boot/compressed/head.S
b. 运行内核汇编部分 head.S 入口stext //arch/arm/kernel/head.S
检测合法性(CPU 类型,机器类型)
c. 运行内核C部分 start_kernel //init/main.c
CPU,机器参数的安装 setup_arch
中断,定时,终端,内存等最基本的初始化
创建核心进程 kernel_init运行,启动多任务调度,原父进程空转cpu_ide - 挂载rootfs (mount_root)
- 运行应用程序 //第一个应用程序是init (由u-boot的bootargs里的init=/linuxrc来指定)
a. 运行启动脚本 (run_init_process("/etc/init.d/rcS")) //由init来解析脚本执行
b. 其它应用程序 //一般添加在脚本的最后(如在rcS末尾加 ./app)
2.U-boot 启动源码分析
-
上电系统从哪里开始,启动代码放在什么位置 ?
上电后,有的系统可通过硬件管脚的电平来选择从Nandflash还是从Norflash启动。这里是指定从Nandflash启动的
启动代码U-boot 是不能放在RAM中的,因掉电就消失了。 -
boot第一件是为何是设置为SVC模式?
为安全性,CPU本身提出了多种模式来实现安全性,和效率兼顾。
SVC模式就是CPU对资源的一种保护。在普通用户模式是不能访问到的。只有切换到SVC模式才能访问。 -
为什么并关闭中断,MMU,看门狗等?
初始时为安全性,把系统单纯化, 排除掉别的干扰,仅仍u-boot实现单纯的搬移代码,
的功能。 所以关掉中断,避免中断打断带来的保存返回的问题。 关掉MMU,因为u-boot软件是硬件实地址访问。
根本没有用到内存地址映射。 看门狗如果没关,硬件上默认到时会复位的。 所以要关掉 -
为何设备初始引导不能用C代码,要用汇编代码?
特殊指令,如操作协处理器, MMC CASH ,切换SVC模式, 等C不能做到。 -
U-BOOT为何要搬移到RAM中运行?
在RAM中速度更快,但因掉电就没了,所以要保存在Nandflash或Norflash中。
如果搬移,直接在Norflash上运行也是可以的。 Nandflash因是按块操作的,不太合适直接运行。 -
U-boot如何传递参数到内核。 移植时要注意哪些?
方式一 采用param_struct: (我们现在使用的是这种方式) 见common/cmd_boot.c go命令的优化
方式二 采用taglist:
/—u-boot 的启动步骤(重点)
//阶段一(汇编)
设置为SVC模式,关闭中断,MMU,看门狗 //准备
基本硬件设备初始化 //初始化时钟,串口,flash,内存 见cpu/arm_cortexa8/start.S 的 cpu_init_crit
自搬移到内存 //copy_uboot_to_ram 或relocate
设置好栈 //stack_setup
跳转到第二阶段代码入口 //ldr pc, _start_armboot
//阶段二(C语言)
大部分硬件初始化 //lib_arm/board.c/start_armboot -> init_sequence
搬移内核到内存 //common/main.c main_loop -> getenv (“bootcmd”) bootdelay >= 0 && s && !abortboot (bootdelay)) 下的 run_command (bootcmd)
运行内核
2.1第一条指令位置
{//---u-boot.lds 或 u-boot.map 指明了第一条指令位置
arch/arm/cpu/armv7/start.o
}
2.2u-boot的启动入口
{//---arch/arm/cpu/armv7/start.S u-boot的启动入口
_start: b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
reset:
/*
* set the cpu to SVC32 mode
*/
mrs r0, cpsr
bic r0, r0, #0x1f
orr r0, r0, #0xd3
msr cpsr,r0
bl cpu_init_cp15 //关闭中断 cache MMU等
bl cpu_init_crit
bl _main //跳到C部分 位置 arch/arm/lib/board.c ( 在u-boot.map里搜索_main)
ENTRY(relocate_code) //自搬移 重定位 (运行时机见 u-boot.map 里执行位置)
adr r0, _start
cmp r0, r6
moveq r9, #0 /* no relocation. relocation offset(r9) = 0 */
beq relocate_done /* skip relocation */
mov r1, r6 /* r1 <- scratch for copy_loop */
ldr r3, _image_copy_end_ofs
add r2, r0, r3 /* r2 <- source end address */
copy_loop:
ldmia r0!, {r9-r10} /* copy from source address [r0] */
stmia r1!, {r9-r10} /* copy to target address [r1] */
cmp r0, r2 /* until source end address [r2] */
blo copy_loop
ENDPROC(relocate_code)
ENTRY(cpu_init_cp15)
/*
* Invalidate L1 I/D
*/
mov r0, #0 @ set up for MCR
mcr p15, 0, r0, c8, c7, 0 @ invalidate TLBs
mcr p15, 0, r0, c7, c5, 0 @ invalidate icache
/*
* disable MMU stuff and caches
*/
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002000 @ clear bits 13 (--V-)
bic r0, r0, #0x00000007 @ clear bits 2:0 (-CAM)
mcr p15, 0, r0, c1, c0, 0
mov pc, lr @ back to my caller
ENDPROC(cpu_init_cp15)
ENTRY(cpu_init_crit)
b lowlevel_init @ go setup pll,mux,memory //位置board/samsung/fs4412/libfs4412.o( 在u-boot.map里搜索lowlevel_init)
ENDPROC(cpu_init_crit)
}
2.3基本硬件初始化
{//---board/samsung/fs4412/lowlevel_init.S 基本硬件初始化 (关闭看门狗中断 时钟初始化 串口初始化 nand初始化 dram初始化)
lowlevel_init: //有些初始化,已被三星剥离到 BLO或BL1 中
/* init system clock */
bl system_clock_init
/* Memory initialize */
bl mem_ctrl_asm_init
/* for UART */
bl uart_asm_init
mov pc, lr
}
2.4大部分硬件初始化
{//---arch/arm/lib/board.c 大部分硬件初始化, 调用主循环main_loop(见common/main.c)
init_fnc_t *init_sequence[] = {
arch_cpu_init, /* basic arch cpu dependent setup */
mark_bootstage,
#if defined(CONFIG_BOARD_EARLY_INIT_F)
board_early_init_f,
#endif
timer_init, /* initialize timer */
env_init, /* initialize environment */
init_baudrate, /* initialze baudrate settings */
serial_init, /* serial communications setup */
console_init_f, /* stage 1 init of console */
display_banner, /* say that we are here */
dram_init, /* configure available RAM banks */
NULL,
};
void board_init_r(gd_t *id, ulong dest_addr)
{
board_init(); /* Setup chipselects */
/* main_loop() can return to retry autoboot, if so just run it again. */
for (;;) {
main_loop(); //调用主循环main_loop
}
}
void board_init(ulong bootflag)
{
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) { //大部分硬件初始化
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
}
}
2.5BootLoader两种模式切换
{//5.common/main.c //主循环main_loop 实现 bootdelay延时时间到之前无输入,则加载bootcmd进入自启动模式;如果有输入则进入交互模式
void main_loop (void)
{
s = getenv ("bootdelay");
bootdelay = s ? (int)simple_strtol(s, NULL, 10) : CONFIG_BOOTDELAY;
s = getenv ("bootcmd"); //获取自启动命令如 bootcmd = tftp 20008000 zImage ; go zImage 表示从网络加载内核运行
if (bootdelay >= 0 && s && !abortboot (bootdelay)) {
run_command (s, 0); //如果延时大于等于零,并且没有在延时过程中接收到按键,则运行bootcmd命令,引导内核。进入自启动模式
}
//否则进入交互模式
/*
* Main Loop for Monitor Command Processing
*/
for (;;) {
len = readline (CONFIG_SYS_PROMPT); //读取命令
rc = run_command (lastcommand, flag); //运行命令
}
}
}
}
}
3.u-boot 启动分析
3.1u-boot环境变量设置
ORIGEN # pri
baudrate=115200
bootargs=root=/dev/nfs nfsroot=192.168.2.231:/nfs/rootfs rw console=ttySAC2,115200 clk_ignore_unused init=/linuxrc ip=192.168.2.10
bootcmd=tftp 41000000 uImage;tftp 42000000 exynos4412-origen.dtb;bootm 41000000 - 42000000
bootdelay=3
ethact=dm9000
ethaddr=11:22:33:44:55:66
fileaddr=42000000
filesize=8400
gatewayip=192.168.2.1
ipaddr=192.168.2.10
myboard=FS4412
netmask=255.255.255.0
serverip=192.168.2.231
stderr=serial
stdin=serial
stdout=serial
Environment size: 498/16380 bytes
3.2u-boot启动阶段
{//-------u-boot启动阶段
U-Boot 2013.01 (Aug 24 2014 - 12:01:19) for FS4412
CPU: Exynos4412@1000MHz
Board: FS4412
DRAM: 1 GiB
WARNING: Caches not enabled
MMC: MMC0: 3728 MB
In: serial
Out: serial
Err: serial
MMC read: dev # 0, block # 48, count 16 ...16 blocks read: OK
eMMC CLOSE Success.!!
Checking Boot Mode ... EMMC4.41
Net: dm9000
Hit any key to stop autoboot: 3 2 1 0
dm9000 i/o: 0x5000000, id: 0x90000a46
DM9000: running in 16 bit mode
MAC: 11:22:33:44:55:66
operating at 100M full duplex mode
Using dm9000 device
TFTP from server 192.168.9.120; our IP address is 192.168.9.9 //对应bootcmd的 tftp 0x41000000 uImage
Filename 'uImage'.
Load address: 0x41000000
Loading: *#################################################################
#################################################################
#################################################################
#################################################################
#################################################################
#################################################################
#################################################################
#################################################################
#################################################################
#######
69.3 KiB/s
done
Bytes transferred = 3028040 (2e3448 hex)
dm9000 i/o: 0x5000000, id: 0x90000a46
DM9000: running in 16 bit mode
MAC: 11:22:33:44:55:66
operating at 100M full duplex mode
Using dm9000 device
TFTP from server 192.168.9.120; our IP address is 192.168.9.9 //对应bootcmd的 tftp 42000000 exynos4412-fs4412.dtb
Filename 'exynos4412-fs4412.dtb'.
Load address: 0x42000000
Loading: *#######
393.6 KiB/s
done
Bytes transferred = 33876 (8454 hex)
Booting kernel from Legacy Image at 41000000 ...
Image Name: Linux-3.14.0
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 3027976 Bytes = 2.9 MiB
Load Address: 40008000
Entry Point: 40008000
Verifying Checksum ... OK
Flattened Device Tree blob at 42000000
Booting using the fdt blob at 0x42000000
Loading Kernel Image ... OK
Loading Device Tree to 4fff4000, end 4ffff453 ... OK
Starting kernel ... /*启动内核(对应bootmcd的 bootm 41000000 - 42000000)
如果到这里启动失败,可能原因
1.u-boot参数设置错误 如bootargs 中ttySAC2 设为了ttySAC1
2.uImage 有问题。 换一个OK的试试,或把这个uImage放在别的板上验证下
3.内核源码有问题, 加打印信息跟踪和打开内核调试信息开关, init\main.c start_kernel()
如machine type 不匹配
4.硬件相关,如u-boot初始CPU频率,分频不对
*/
3.3linux内核启动阶段
Booting Linux on physical CPU 0xa00
//init\main.c start_kernel()
Linux version 3.14.0 (david@ubuntu) (gcc version 4.6.4 (crosstool-NG hg+default-2685dfa9de14 - tc0002) ) #23 SMP PREEMPT Fri Aug 15 11:30:16 CST 2014
CPU: ARMv7 Processor [413fc090] revision 0 (ARMv7), cr=10c5387d
CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache
Machine model: Insignal Origen evaluation board based on Exynos4412
Memory policy: Data cache writealloc
CPU EXYNOS4412 (id 0xe4412011)
Running under secure firmware.
PERCPU: Embedded 7 pages/cpu @eefb6000 s7424 r8192 d13056 u32768
Built 1 zonelists in Zone order, mobility grouping on. Total pages: 256528
Kernel command line: root=/dev/nfs nfsroot=192.168.9.120:/nfs/rootfs rw console=ttySAC2,115200 init=/linuxrc ip=192.168.9.9 //内核对u-boot传入的bootargs参数的解析
PID hash table entries: 4096 (order: 2, 16384 bytes)
Dentry cache hash table entries: 131072 (order: 7, 524288 bytes)
Inode-cache hash table entries: 65536 (order: 6, 262144 bytes)
Memory: 1016852K/1032192K available (3956K kernel code, 237K rwdata, 1320K rodata, 231K init, 276K bss, 15340K reserved, 270336K highmem)
Virtual kernel memory layout:
vector : 0xffff0000 - 0xffff1000 ( 4 kB)
fixmap : 0xfff00000 - 0xfffe0000 ( 896 kB)
vmalloc : 0xf0000000 - 0xff000000 ( 240 MB)
lowmem : 0xc0000000 - 0xef800000 ( 760 MB)
pkmap : 0xbfe00000 - 0xc0000000 ( 2 MB)
modules : 0xbf000000 - 0xbfe00000 ( 14 MB)
.text : 0xc0008000 - 0xc052f41c (5278 kB)
.init : 0xc0530000 - 0xc0569d00 ( 232 kB)
.data : 0xc056a000 - 0xc05a5540 ( 238 kB)
.bss : 0xc05a554c - 0xc05ea584 ( 277 kB)
SLUB: HWalign=64, Order=0-3, MinObjects=0, CPUs=4, Nodes=1
Preemptible hierarchical RCU implementation.
RCU restricting CPUs from NR_CPUS=8 to nr_cpu_ids=4.
RCU: Adjusting geometry for rcu_fanout_leaf=16, nr_cpu_ids=4
NR_IRQS:16 nr_irqs:16 16
Exynos4x12 clocks: sclk_apll = 500000000, sclk_mpll = 800000000
sclk_epll = 96000000, sclk_vpll = 350000000, arm_clk = 1000000000
sched_clock: 32 bits at 200 Hz, resolution 5000000ns, wraps every 10737418240000000ns
Console: colour dummy device 80x30
Calibrating delay loop... 1992.29 BogoMIPS (lpj=4980736)
pid_max: default: 32768 minimum: 301
Mount-cache hash table entries: 2048 (order: 1, 8192 bytes)
Mountpoint-cache hash table entries: 2048 (order: 1, 8192 bytes)
CPU: Testing write buffer coherency: ok
missing device node for CPU 0
missing device node for CPU 1
missing device node for CPU 2
missing device node for CPU 3
CPU0: thread -1, cpu 0, socket 10, mpidr 80000a00
Setting up static identity map for 0x403c0e10 - 0x403c0e68
CPU1: Booted secondary processor
CPU1: thread -1, cpu 1, socket 10, mpidr 80000a01
CPU2: Booted secondary processor
CPU2: thread -1, cpu 2, socket 10, mpidr 80000a02
CPU3: Booted secondary processor
CPU3: thread -1, cpu 3, socket 10, mpidr 80000a03
Brought up 4 CPUs
SMP: Total of 4 processors activated.
CPU: All CPU(s) started in SVC mode.
devtmpfs: initialized
VFP support v0.3: implementor 41 architecture 3 part 30 variant 9 rev 4
pinctrl core: initialized pinctrl subsystem
regulator-dummy: no parameters
NET: Registered protocol family 16
DMA: preallocated 256 KiB pool for atomic coherent allocations
S3C Power Management, Copyright 2004 Simtec Electronics
EXYNOS4x12 PMU Initialize
EXYNOS: Initializing architecture
bio: create slab <bio-0> at 0
VMEM_VDD_2.8V: 2800 mV
SCSI subsystem initialized
usbcore: registered new interface driver usbfs
usbcore: registered new interface driver hub
usbcore: registered new device driver usb
s3c-i2c 13860000.i2c: slave address 0x00
s3c-i2c 13860000.i2c: bus frequency set to 19 KHz
sec_pmic 0-0066: No interrupt specified, no interrupts
VDD_ALIVE: failed to apply 1100000uV constraint
s5m8767-pmic s5m8767-pmic: regulator init failed for 0
s3c-i2c 13860000.i2c: i2c-0: S3C I2C adapter
Switched to clocksource mct-frc
NET: Registered protocol family 2
TCP established hash table entries: 8192 (order: 3, 32768 bytes)
TCP bind hash table entries: 8192 (order: 5, 163840 bytes)
TCP: Hash tables configured (established 8192 bind 8192)
TCP: reno registered
UDP hash table entries: 512 (order: 2, 24576 bytes)
UDP-Lite hash table entries: 512 (order: 2, 24576 bytes)
NET: Registered protocol family 1
RPC: Registered named UNIX socket transport module.
RPC: Registered udp transport module.
RPC: Registered tcp transport module.
RPC: Registered tcp NFSv4.1 backchannel transport module.
futex hash table entries: 1024 (order: 4, 65536 bytes)
bounce pool size: 64 pages
ROMFS MTD (C) 2007 Red Hat, Inc.
msgmni has been set to 1458
io scheduler noop registered
io scheduler deadline registered
io scheduler cfq registered (default)
dma-pl330 12680000.pdma: Loaded driver for PL330 DMAC-1315632
dma-pl330 12680000.pdma: DBUFF-32x4bytes Num_Chans-8 Num_Peri-32 Num_Events-32
dma-pl330 12690000.pdma: Loaded driver for PL330 DMAC-1315632
dma-pl330 12690000.pdma: DBUFF-32x4bytes Num_Chans-8 Num_Peri-32 Num_Events-32
dma-pl330 12850000.mdma: Loaded driver for PL330 DMAC-1315632
dma-pl330 12850000.mdma: DBUFF-64x8bytes Num_Chans-8 Num_Peri-1 Num_Events-32
Serial: 8250/16550 driver, 4 ports, IRQ sharing disabled
13800000.serial: ttySAC0 at MMIO 0x13800000 (irq = 84, base_baud = 0) is a S3C6400/10
13810000.serial: ttySAC1 at MMIO 0x13810000 (irq = 85, base_baud = 0) is a S3C6400/10
13820000.serial: ttySAC2 at MMIO 0x13820000 (irq = 86, base_baud = 0) is a S3C6400/10
console [ttySAC2] enabled
13830000.serial: ttySAC3 at MMIO 0x13830000 (irq = 87, base_baud = 0) is a S3C6400/10
brd: module loaded
loop: module loaded
dm9000 5000000.ethernet: read wrong id 0x01010101
eth0: dm9000a at f0076000,f0078004 IRQ 167 MAC: 00:0a:2d:a6:55:a2 (platform data)
usbcore: registered new interface driver asix
usbcore: registered new interface driver ax88179_178a
usbcore: registered new interface driver cdc_ether
usbcore: registered new interface driver smsc75xx
usbcore: registered new interface driver smsc95xx
usbcore: registered new interface driver net1080
usbcore: registered new interface driver cdc_subset
usbcore: registered new interface driver zaurus
usbcore: registered new interface driver cdc_ncm
ehci_hcd: USB 2.0 'Enhanced' Host Controller (EHCI) Driver
ehci-exynos: EHCI EXYNOS driver
usbcore: registered new interface driver usb-storage
mousedev: PS/2 mouse device common for all mice
input: 100a0000.keypad as /devices/100a0000.keypad/input/input0
device-mapper: ioctl: 4.27.0-ioctl (2013-10-30) initialised: dm-devel@redhat.com
sdhci: Secure Digital Host Controller Interface driver
sdhci: Copyright(c) Pierre Ossman
s3c-sdhci 12530000.sdhci: clock source 2: mmc_busclk.2 (40000000 Hz)
mmc0: no vqmmc regulator found
mmc0: SDHCI controller on samsung-hsmmc [12530000.sdhci] using ADMA
Synopsys Designware Multimedia Card Interface Driver
dwmmc_exynos 12550000.mmc: no vmmc regulator found: -19
dwmmc_exynos 12550000.mmc: Using internal DMA controller.
dwmmc_exynos 12550000.mmc: Version ID is 240a
dwmmc_exynos 12550000.mmc: DW MMC controller at irq 109, 32 bit host data width, 128 deep fifo
dwmmc_exynos 12550000.mmc: 1 slots initialized
usbcore: registered new interface driver usbhid
usbhid: USB HID core driver
TCP: cubic registered
NET: Registered protocol family 17
NET: Registered protocol family 15
Registering SWP/SWPB emulation handler
VMEM_VDD_2.8V: disabling
regulator-dummy: disabling
drivers/rtc/hctosys.c: unable to open rtc device (rtc0)
mmc1: BKOPS_EN bit is not set
dm9000 5000000.ethernet eth0: link down
mmc_host mmc1: Bus speed (slot 0) = 50000000Hz (slot req 52000000Hz, actual 50000000HZ div = 0)
mmc_host mmc1: Bus speed (slot 0) = 100000000Hz (slot req 52000000Hz, actual 50000000HZ div = 1)
mmc1: new high speed DDR MMC card at address 0001
mmcblk0: mmc1:0001 4YMD3R 3.64 GiB
mmcblk0boot0: mmc1:0001 4YMD3R partition 1 4.00 MiB
mmcblk0boot1: mmc1:0001 4YMD3R partition 2 4.00 MiB
mmcblk0rpmb: mmc1:0001 4YMD3R partition 3 512 KiB
mmcblk0: p1 p2 p3 p4
mmcblk0boot1: unknown partition table
mmcblk0boot0: unknown partition table
dm9000 5000000.ethernet eth0: link up, 100Mbps, full-duplex, lpa 0x45E1
IP-Config: Guessing netmask 255.255.255.0
IP-Config: Complete:
device=eth0, hwaddr=00:0a:2d:a6:55:a2, ipaddr=192.168.9.9, mask=255.255.255.0, gw=255.255.255.255
host=192.168.9.9, domain=, nis-domain=(none)
bootserver=255.255.255.255, rootserver=192.168.9.120, rootpath=
clk: Not disabling unused clocks
VFS: Mounted root (nfs filesystem) on device 0:10. /*挂载根文件系统(从 nfs filesystem知挂载的是NFS rootfs)
也可挂载jffs2 ramdisk cramfs等格式rootfs 等
如果到这里启动失败,可能原因
1. bootargs 参数设置用问题 ,如设置mtdblock2 写成了mtdblock3, 或路径,名称不对等
2. 设为nfs挂载,验证rootfs内容有没问题
3. 制作镜像过程有没问题
*/
devtmpfs: mounted
Freeing unused kernel memory: 228K (c0530000 - c0569000)
3.4根文件系统阶段(可运行应用程序)
[root@farsight ]# ls
a.out dev lib mnt root sys usr
bin etc linuxrc proc sbin tmp var
[root@farsight ]# ./a.out
hello
4.U-BOOT 移植方法
善用对比软件Beyond
- 选择官方源码版本下载, 配置编译
a. 指定交叉编译工具链
b. 指定cpu 和board(参考最类似配置如origen)
c. 编译 - 实现串口信息输出
a. 跟踪运行路径(led点灯法)
b. 串口输出(检查uart初始化相关部分代码 见lowlevel_init.s) - 网卡移植(实现能用tftp nfs 方便开发调试)
a. 寄存器地址
b. 参数设置 - FLASH移植(实现能下载软件到FLASH,产品能离线运行)
04Linux内核分析(Linux内核基本概念,Linux内核启动分析,Linux内核调试方法)
1.Linux内核基本概念
1.1Linux内核
- 从技术上说 linux 是一个内核
- “内核”指的是一个提供硬件抽象层、磁盘及文件系统控制、多任务等功能的系统软件。一个内核不是一套完整的操作系统。
- 通常我们使用的 linux 系统是一个集 linux 内核、工具集、各种库、桌面管理器、应用程序等一体的一个发布包 (发行版)
1.2主流的 Linux 发行版
- Debian GNU/Linux
- Red Hat Linux
- Fedora Core
- Ubuntu Linux
- SUSE Linux
- Gentoo Linux
- Asianux
- Slackware Linux
- Turbo Linux
- CentOS
1.3Linux 内核的特性
- 免费开源
- 可以移植,支持的硬件平台广泛
arm, i386, m68k, m32r,m68knommu, mips, ppc, s390, sh, sparc - 高可扩展性
- 可剪裁、可扩展,可以运行在大型主机,也可以运行在个人计算机上
- 高可靠性、稳定性
- 稳定性是linux鲜明特点,安装了linux系统的主机,
连续运行一年不宕机是很平常的事情 - 超强的网络功能
- 真正的多任务,多用户系统
- 模块化设计
- 模块可以动态加载,卸载,可以减少系统体积,同时可以用来解决冲突问题,模块调试
1.4Linux内核版本
目前linux系统采用 A.B.C.D 的版本号管理方式
- A 表示linux的主版本号
- B 表示linux的次版本号,B 为偶数表示稳定版本,奇数表示开发中的版本
- C 表示linux的发行版本号
- D 表示更新版本号
主版本(X.Y)
1.0 2.0 2.2 2.4 2.6 3.x
Linux内核子系统
- 进程管理
- 内存管理
- 文件系统
- 网络协议
- 设备管理
linux系统不是正真的实时系统(采用时间片轮转的方式做的)
美国军方的Vxwork是正真的实时系统(中断抢占)
1.5Linux内核模块结构图

应用访问内核要通过系统调用
内核访问硬件要通过映射
2.linux内核编译(移植好的)
2.1编译内核 make uImage
 先改makefile中的交叉编译工具
先改makefile中的交叉编译工具

linux@linux:~/linux-3.14-fs4412$ make uImage
CHK include/config/kernel.release
CHK include/generated/uapi/linux/version.h
CHK include/generated/utsrelease.h
make[1]: “include/generated/mach-types.h”是最新的。
CALL scripts/checksyscalls.sh
CHK include/generated/compile.h
Kernel: arch/arm/boot/Image is ready
Kernel: arch/arm/boot/zImage is ready
Image arch/arm/boot/uImage is ready
linux@linux:~/linux-3.14-fs4412$


2.2编译设备树 make dtbs
linux@linux:~/linux-3.14-fs4412$ make dtbs
DTC arch/arm/boot/dts/exynos4210-origen.dtb
DTC arch/arm/boot/dts/exynos4210-smdkv310.dtb
DTC arch/arm/boot/dts/exynos4210-trats.dtb
DTC arch/arm/boot/dts/exynos4210-universal_c210.dtb
DTC arch/arm/boot/dts/exynos4412-odroidx.dtb
DTC arch/arm/boot/dts/exynos4412-origen.dtb
DTC arch/arm/boot/dts/exynos4412-fs4412.dtb
DTC arch/arm/boot/dts/exynos4412-smdk4412.dtb
DTC arch/arm/boot/dts/exynos4412-tiny4412.dtb
DTC arch/arm/boot/dts/exynos4412-trats2.dtb
DTC arch/arm/boot/dts/exynos5250-arndale.dtb
DTC arch/arm/boot/dts/exynos5250-smdk5250.dtb
DTC arch/arm/boot/dts/exynos5250-snow.dtb
DTC arch/arm/boot/dts/exynos5420-arndale-octa.dtb
DTC arch/arm/boot/dts/exynos5420-smdk5420.dtb
DTC arch/arm/boot/dts/exynos5440-sd5v1.dtb
DTC arch/arm/boot/dts/exynos5440-ssdk5440.dtb
![]()
![]()
2.3Linux内核代码结构(1)

2.4Linux系统源代码目录结构(2)

Linux内核启动分析
3.嵌入式系统启动信息分析
3.1u-boot启动阶段
U-Boot 2013.01 (Aug 24 2014 - 12:01:19) for FS4412
CPU: Exynos4412@1000MHz
Board: FS4412
DRAM: 1 GiB
……Loading: * ######################
Starting kernel ...
3.2linux内核启动阶段
Booting Linux on physical CPU 0xa00
Linux version 3.14.0 (david@ubuntu)
CPU: ARMv7 Processor [413fc090] revision 0 (ARMv7), cr=10c5387d
Machine model: Insignal Origen evaluation board based on Exynos4412
IP-Config: Complete:
VFS: Mounted root (nfs filesystem) on device 0:10
3.3根文件系统阶段(可运行应用程序)
[root@farsight ]# ls
a.out dev lib mnt root sys usr
bin etc linuxrc proc sbin tmp va
3.4嵌入式系统 启动流程

//阶段一(汇编)
设置为SVC模式,关闭中断,MMU,看门狗
基本硬件设备初始化 //初始化时钟,串口,flash,内存
自搬移到内存
设置好栈 跳转到C阶段
//阶段二(C语言)
大部分硬件初始化
搬移内核到 内存
运行内核
3.5内核启动流程
a. 自解压内核 decompess (arch/arm/boot/compressed/head.S)
b. 运行内核汇编部分 head.S 入口stext (arch/arm/kernel/head.S)
检测合法性(CPU 类型,机器类型)
c. 运行内核C部分 start_kernel (init/main.c)
CPU,机器参数的安装 setup_arch
中断,定时,终端,内存等最基本的初始化
创建核心进程 kernel_init运行,启动多任务调度
d. 挂载rootfs
e. 运行第一个应用程序init (一般是 linuxrc)
4.Linux内核调试方法
4.1内核调试方法1:点灯法
ldr r0, =0x11000c40 @GPK2_7 led2
ldr r1, [r0]
bic r1, r1, #0xf0000000
orr r1, r1, #0x10000000
str r1, [r0]
ldr r0, =0x11000c44
mov r1,#0xff
str r1, [r0]
4.2内核调试方法 2:printk打印输出信息
puts (内核解压前)
printascii (console初始化前)
printk (内核解压后,信息输出显示是在 console 初始化之后)
打印级别
#define KERN_EMERG "<0>" /* system is unusable */
#define KERN_ALERT "<1>” /* action must be taken immediately */
#define KERN_CRIT "<2>" /* critical conditions */
#define KERN_ERR "<3>" /* error conditions */
#define KERN_WARNING "<4>" /* warning conditions */
#define KERN_NOTICE "<5>" /* normal but significant condition */
#define KERN_INFO "<6>" /* informational */
#define KERN_DEBUG "<7>" /* debug-level messages
printk( KERN_INFO “ \n INFO Level \n”);
cat /proc/sys/kernel/printk 显示 4 4 1 7
echo “7 4 1 7” > /proc/sys/kernel/printk 后
cat /proc/sys/kernel/printk 显示7 4 1 7
4.3内核调试方法 3: OOP内核异常信息
修改drivers/char/fs4412_led_drv.c
在s5pv210_led_init函数中int ret=0;下增加下面语句: int *ptr = NULL; *ptr = 0xff;
运行该内核报错
[ 1.165000] Unable to handle kernel NULL pointer dereference at virtual address 00000000
[ 1.170000] pgd = c0004000
[ 1.175000] [00000000] *pgd=00000000
[ 1.175000] Internal error: Oops: 805 [#1] PREEMPT SMP ARM
[ 1.180000] Modules linked in:
[ 1.185000] CPU: 0 PID: 1 Comm: swapper/0 Not tainted 3.14.0 #25
[ 1.190000] task: ee8a0000 ti: ee8a4000 task.ti: ee8a4000
[ 1.195000] PC is at s5pv210_led_init+0x18/0x180
[ 1.200000] LR is at do_one_initcall+0x30/0x144
[ 1.205000] pc : [<c024225c>] lr : [<c00087b4>] psr: 60000153
[ 1.205000] sp : ee8a5ef8 ip : c059afac fp : 00000000
[ 1.215000] r10: c052d4fc r9 : c0564b80 r8 : c0242244
[ 1.220000] r7 : c05a3400 r6 : c055134c r5 : 00000000 r4 : ee8a4000
[ 1.230000] r3 : 00000055 r2 : c04c0430 r1 : 00000001 r0 : 1f400000
[ 1.235000] Flags: nZCv IRQs on FIQs off Mode SVC_32 ISA ARM Segment kernel
[ 1.245000] Control: 10c5387d Table: 4000404a DAC: 00000015
[ 1.250000] Process swapper/0 (pid: 1, stack limit = 0xee8a4240)
[ 1.255000] Stack: (0xee8a5ef8 to 0xee8a6000)
找出错位置(arm-none-linux-gnueabi-addr2line)
根据PC is at s5pv210_led_init+0x18/0x180 知道出错的函数是s5pv210_led_init
根据pc : [<c024225c>] 知道出错的位置
#arm-none-linux-gnueabi-addr2line c024225c -e vmlinux -f 在源码中会显示具体出错的位置
05Linux内核移植及网卡移植
1.Linux内核 配置编译
1.1下载内核源码
(谷歌搜索 linux-3.14.tar.xz ,会很快找到有许多内核版本的列表)
- Linux Kernel 3.17.4/3.14.25/3.10.61 发布下载:
https://www.linuxidc.com/Linux/2014-11/109721.htm - Linux Kernel 3.14.79:
https://www.oschina.net/news/77032/linux-kernel-3-14-79-longterm
1.2Linux系统中解压
( tar -xvf linux-3.14.tar.xz 注意不能在与window的共享目录解压)
linux@linux:~$ ls
deja-dup develop Downloads gcc-4.6.4 linux-3.14.79 linux-5.1.8 Music Pictures sdfuse_q u-boot-2013.01-fs4412 u-boot-fs4412.bin Videos 未命名文件夹
Desktop Documents examples.desktop gcc-4.6.4.tar.xz linux-3.14-fs4412 linux_kernel myfifo Public Templates u-boot-2013.01-fs4412.tar.gz uImage vmware-tools-distrib
linux@linux:~$ cd linux-3.14.79/
linux@linux:~/linux-3.14.79$ ls
arch COPYING crypto drivers fs init Kbuild kernel MAINTAINERS mm modules.order net REPORTING-BUGS scripts sound tools virt vmlinux.o
block CREDITS Documentation firmware include ipc Kconfig lib Makefile modules.builtin Module.symvers README samples security System.map usr vmlinux
linux@linux:~/linux-3.14.79$
1.3修改Makefile指定交叉编译工具链
(配置列表见 arch/arm/configs/ 找最类似的)
直接编译会报错,需要先选配
导入配置
导入配置,发现出错了,需要在Makefile中修改交叉编译工具链
再次导入配置
1.4配置内核 make menuconfig
编译内核之前需要激活配置
linux@linux:~/linux-3.14.79$ make menuconfig
*** Unable to find the ncurses libraries or the
*** required header files.
*** 'make menuconfig' requires the ncurses libraries.
***
*** Install ncurses (ncurses-devel) and try again.
***
make[1]: *** [scripts/kconfig/dochecklxdialog] Error 1
make: *** [menuconfig] Error 2
激活时出错 Unable to find the ncurses libraries
解决方法:
linux@linux:~/linux-3.14.79$ sudo apt-get install ncurses-dev
linux@linux:~/linux-3.14.79$ make menuconfig

1.5编译内核 make uImage
linux@linux:~/linux-3.14.79$ make uImage
出现如下信息表示编译成功
linux@linux:~/linux-3.14.79$ make uImage -j2
CHK include/config/kernel.release
CHK include/generated/uapi/linux/version.h
CHK include/generated/utsrelease.h
make[1]: “include/generated/mach-types.h”是最新的。
CALL scripts/checksyscalls.sh
CHK include/generated/compile.h
Kernel: arch/arm/boot/Image is ready
Kernel: arch/arm/boot/zImage is ready
Image arch/arm/boot/uImage is ready
linux@linux:~/linux-3.14.79$
![]()
1.6编译设备树 make dtbs
linux@linux:~/linux-3.14.79$ make dtbs
![]()

1.7网卡移植
开发板上电重启,内核启动以后,卡在了 Starting kernel …

原因:
因为原来的uboot里面没有电源管理单元的驱动,所以导致起不来。需要更换uboot ,现在的uboot是有电源管理驱动,可以解决卡在starting kernel的问题。
更换uboot之后重新上电,内核启动以后,发现内核有崩溃信息

出错分析


- 开发板启动后,BootLoader运行,tftp下载内核,下载内核成功,通过内核挂载根文件系统
- uboot环境变量里有个参数bootargs(启动参数),uboot在bootm启动内核之后,会把bootargs传递给内核
- 内核通过bootargs知道根文件系统从哪里挂载(在远程的某台电脑上)
- 根文件系统是由内核挂载的,内核挂载必须通过网线来进行
- 开发板上的网卡,和三星官方发布的demo板(origen板)的网卡不一样,所以需要对网卡部分作出修改
2.网卡移植—平台无关
2.1配置内核支持网络
$ make menuconfig
配置网络协议支持TCP/IP
[*] Networking support ---> //注意要先输入y 选择该菜单,再按enter键,才能看到下面的选项
Networking options --->
<*> Packet socket
<*> Unix domain sockets
[*] TCP/IP networking
[*] IP: kernel level autoconfiguration
[*] IP: BOOTP support
配置支持网络文件系统 NFS
File systems --->
[*] Network File Systems --->
<*> NFS client support
<*> NFS client support for NFS version 2
[*] NFS client support for NFS version 3
[*] NFS client support for the NFSv3
ACL protocol extension
[*] Root file system on NFS
配置支持dm9000网卡驱动
Device Drivers --->
[*] Network device support --->
[*] Ethernet driver support --->
<*> DM9000 support (网卡驱动里面可以只选择这个,把其他的都去掉)
网卡移植—平台相关

2.2置设备树描述网卡和CPU的链接情况
$ vim arch/arm/boot/dts/exynos4412-origen.dts 在 regulators 前添加下面代码
srom-cs1@5000000 {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x5000000 0x1000000>; 对应芯片手册 3 Memory Map 的0x0500_0000 和 16 MB
ranges;
ethernet@5000000 {
compatible = "davicom,dm9000"; 内核通过该名字来匹配驱动
reg = <0x5000000 0x2 0x5000004 0x2>; 寄存器地址和数据宽度
interrupt-parent = <&gpx0>; 继承于 中断控制器gpx0
interrupts = <6 4>; 6 对应中断源 DM9000_IRQ -> XEINT6 。4对应 active high level-sensitive
davicom,no-eeprom;
mac-address = [00 0a 2d a6 55 a2];
};
};



2.3修改文件driver/clk/clk.c
static bool clk_ignore_unused;
改为
static bool clk_ignore_unused = true; //意思是忽略掉没有使用的时钟

修改好后,开发板上电重启
make uImage -j2表示双线程编译,加快编译时间
移植成功
3.CPU与设备连接描述 - 设备树DeviceTree
- Device Tree是描述硬件信息的数据结构
用于管理 硬件拓扑和硬件资源信息。
Device Tree由一系列被命名的结点(node)和属性(property)组成,而结点本身可包含子结点。
所谓属性,其实就是成对出现的name和value。 - 帮助
百度:linux Device Tree 详解
官网:http://www.devicetree.org 和 http://elinux.org/Device_Tree
源码实例:
说明: Documentation/devicetree/bindings/arm
源码: arch/arm/boot/dts/exynos4412-origen.dts
3.1网卡对应的CPU内部总线节点的描述




最后可以找出使能1对应的是bank1
- 所以地址就是0x5000000,长度就是0x6000000-0x5000000=0x1000000
3.2网卡节点的描述

查看官方给的案例


4.CPU与设备连接描述 - 平台设备
在内核里有一个结构“struct machine_desc”,内核用这个结构表示一个实际存在的板子,而针对每个板子都会有一个文件定义这个结构体,这个文件叫平台代码;
如:arch/arm/mach-s5pv21/mach-smdkv210.c(新版本内核中没有基于Exynos4412的平台代码,这里以s5pv210为例)
MACHINE_START(SMDKV210, "SMDKV210")
/* Maintainer: Kukjin Kim <kgene.kim@samsung.com> */
.atag_offset = 0x100,
.init_irq = s5pv210_init_irq,
.map_io = smdkv210_map_io,
.init_machine = smdkv210_machine_init,
.init_time = samsung_timer_init,
.restart = s5pv210_restart,
.reserve = &smdkv210_reserve,
MACHINE_END06第三方驱动移植(驱动编译进内核Makefile,图像化配置Kconfig,驱动模块,黑白盒对比)
1.第三方驱动 黑盒移植

2.驱动编译进内核Makefile
1、首先找内核中是否已经支持设备的驱动 选配
2、内核中没有的驱动移植进来 --第三方驱动移植
将第三方驱动代码放到linux源码树中的driver目录中
修改 Makefile Kconfig(界面配置)
修改过的和新添加的代码会重新编译
程序需要在板子上运行 就需要使用交叉编译工具编译
mknod /dev/led c或者b 主设备号 次设备号
2.1选择驱动存放目录 (或任意目录)
拷贝LED驱动程序至drivers目录
LED属于字符设备,所以放在drivers/char/目录下
2.2改Makefile让驱动编译进内核(同步修改,对应目录下的Makefile)


2.3改Kconfig (界面可配置)
烧写镜像至开发板
驱动程序测试代码
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/ioctl.h>
#define LED_MAGIC 'L'
#define LED_ON _IOW(LED_MAGIC, 1, int)
#define LED_OFF _IOW(LED_MAGIC, 2, int)
int main(int argc, char **argv)
{
int fd;
fd = open("/dev/led", O_RDWR);
if (fd < 0) {
perror("open");
exit(1);
}
printf("open led ok\n");
//实现LED灯闪烁
while(1)
{
ioctl(fd, LED_ON); //点亮灯
usleep(100000);
ioctl(fd, LED_OFF); //灭灯
usleep(100000);
}
return 0;
}
2.4编译并拷贝至根文件系统
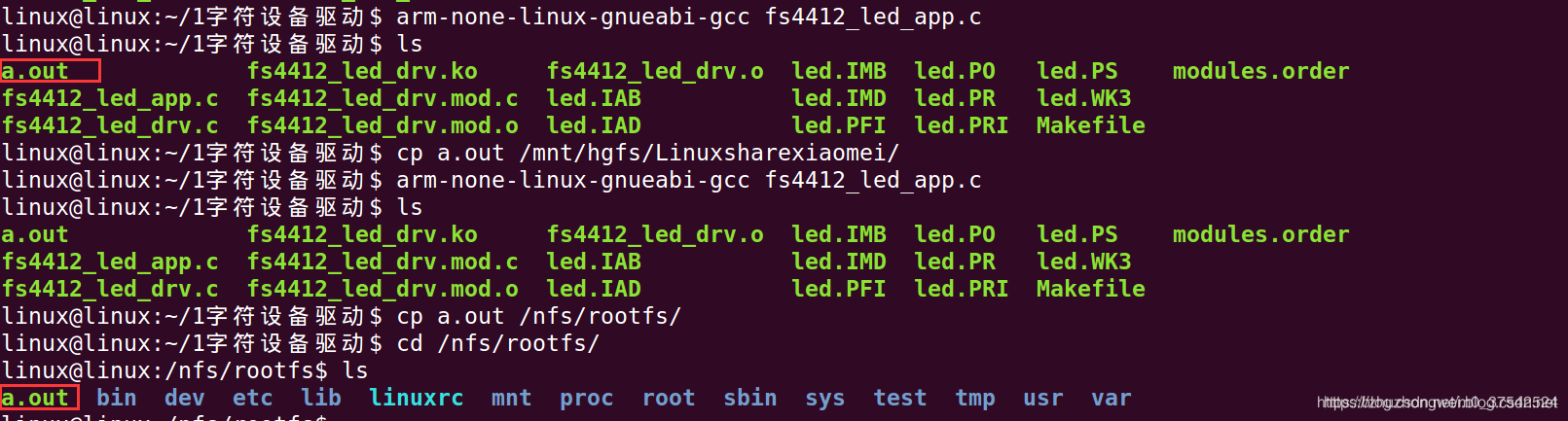
2.5在开发板上运行该测试程序

分析这个打印信息的来源
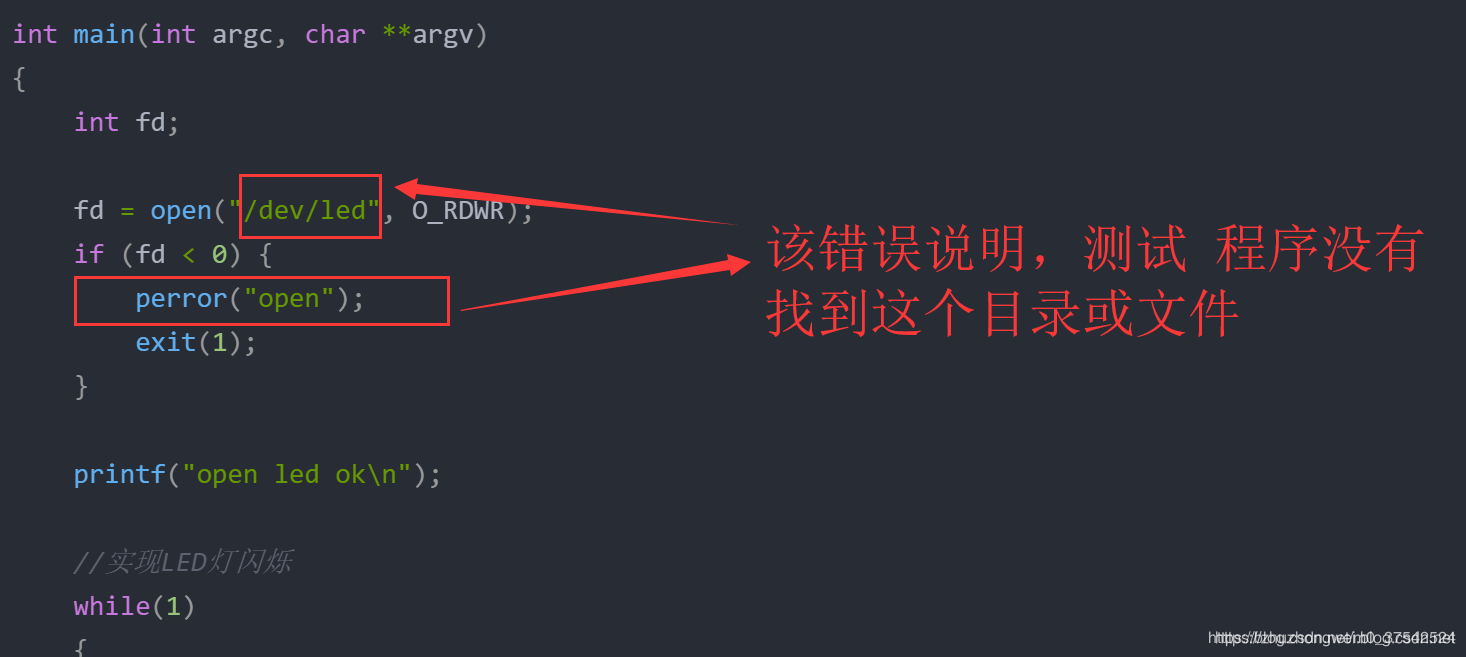
3.需要创建设备文件
3.1创建设备文件

mknod /dev/led c 501 0

创建好设备文件后,再运行测试程序,就可以看到LED灯在闪烁了
4.图形化配置Kconfig
make menuconfig、Makefile、Kconfig、.config 三者的关系
menuconfig 运行的时候,会读取内核下面所有的Kconfig,根据Kconfig生成对应的图形界面
Makfile 具体编译文件
Kconfig 选配,生成图形化界面(在界面中显示一些选项)
在Kconfig中添加一个灯的选项
界面修改好了, 还需要再次修改 Makfile
[] 只有两种选项编译(y)或者不编译(n)
<> 三种选项 编译(y)、不编译(n)或者编译成模块(m)
obj-y obj-n obj-$(CONFIG_XXX)
方便驱动管理
4.1配置Kconfig

linux@linux:~/linux-3.14.79$ make menuconfig
可以看到图形界面中多了一个对应的选项


没有编译LED驱动

开发板上电重启,也可以测试出LED驱动没有被编译进来

5.编译驱动为独立的模块
驱动模块学习 详细视频
linux 内核模块 http://www.makeru.com.cn/live/1392_586.html
驱动初级也会详细讲解
5.1C程序代码编写
创建驱动程序的文件夹,将文件拷贝进来,并为之编写Makfile
5.2Makefile 编写

5.3编译出 ko 模块
- make之后,会自动跳到内核里面,借用内核的Makefile把当前驱动程序编译成ko文件

配置为模块方式


5.4make modules 编译所有的模块

5.5在linux运行时,可以装载和卸载模块

卸载是rmmod


6.白盒移植
- 打印跟踪
所谓白盒移植,就是在驱动代码中加一些打印信息(printk)来跟踪 - 驱动框架
要加打印信息,就要熟悉框架是怎样的
黑白盒对比
黑盒移植
两种方式
1. 驱动编译进内核
选则源码目录
修改Makefile
修改Kconfig
2. 将驱动编译成独立的模块
配置为模块方式 通过修改Kconfig
使用make modules 编译为模块
装载模块 insmod xxx.ko
创建设备结点 mknod /dev/xxx c xx xx
运行测试驱动的应用程序
白盒移植
需要阅读阅读源码,熟悉驱动框架
1. 字符设备 2. 平台设备
字符设备框架
application
User Mode ||
\/
--------------------------------------------------
System Call Interface
||
Kernel Mode \/
Virture File System(VFS)
| | |
Character Block Network
| | |
Device interface
||
\/
-------------------------------------------------
Hardware Physical Device (Hardware)
驱动框架

字符设备框架

字符设备引入
1.一切设备皆文件
对设备的操作的就是 对设备文件的 read write
2. open read write ioctl
3. 将设备进行编号 设备号(主次设备号组成)
字符设备驱动相关
1. 注册获取设备号
2. 初始化设备
3. 操作设备 file_operations -- open release read write ioctl...
4. 两个宏定义 module_init module_exit 两个命令 insmod rmmod
5. 注册设备号 register_chrdev_region
6. cdev_init 初始化字符设备
7. cdev_add 添加字符设备到系统
驱动是被动调用的,是被应用程序触发的
应用程序的 open 调用到驱动的file_operations 的 open
应用程序的 read 调用到驱动的file_operations 的 read
应用程序的 write 调用到驱动的file_operations 的 write
应用程序的 ioctl 调用到驱动的file_operations 的 ioctl
应用程序的 close 调用到驱动的file_operations 的 release
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <asm/io.h>
#define LED_MAGIC 'L'
#define LED_ON _IOW(LED_MAGIC, 1, int)
#define LED_OFF _IOW(LED_MAGIC, 2, int)
#define LED_MA 501
#define LED_MI 0
#define LED_NUM 1
#define LED_CON 0x11000C20
#define LED_DAT 0x11000C24
struct cdev cdev;
unsigned int *ledcon;
unsigned int *leddat;
int led_open (struct inode *inode, struct file *file)
{
printk("led_open\n");
ledcon = ioremap(LED_CON, 4); //内核访问硬件需要地址映射
if(ledcon == NULL)
{
printk("ioremap LED_CON error\n");
return -1;
}
writel(0x01, ledcon); //设置LED3 GPX1_0 为输出模式
leddat = ioremap(LED_DAT, 4); //内核访问硬件需要地址映射
if(leddat == NULL)
{
printk("ioremap LED_DAT error\n");
return -1;
}
writel(1, leddat); //设置LED3 GPX1_0 输出高电平
return 0;
}
int led_release(struct inode *inode, struct file *file)
{
printk("led_close\n");
return 0;
}
long led_ioctl(struct file *file, unsigned int cmd, unsigned long args)
{
switch(cmd)
{
case LED_ON:
printk("led on ..\n");
writel(1, leddat); //设置LED3 GPX1_0 输出高电平
break;
case LED_OFF:
printk("led off ..\n");
writel(0, leddat); //设置LED3 GPX1_0 输出高电平
break;
default:
printk("no command\n");
break;
}
return 0;
}
struct file_operations led_fops = { //文件操作
.owner = THIS_MODULE,
.open = led_open,
.release =led_release,
.unlocked_ioctl = led_ioctl,
};
static led_init(void)
{
int ret;
dev_t devno = MKDEV(LED_MA, LED_MI);
ret= register_chrdev_region(devno, LED_NUM, "newled"); //注册设备号
if(ret)
{
printk("register_chrdev_region error\n");
return -1;
}
cdev_init(&cdev, &led_fops); //初始化字符设备
ret = cdev_add(&cdev, devno, LED_NUM); //添加字符设备到系统中
if (ret < 0) {
printk("cdev_add error\n");
return -1;
}
printk("Led init 5 \n");
return 0;
}
static void led_exit(void)
{
dev_t devno = MKDEV(LED_MA, LED_MI);
cdev_del(&cdev);
unregister_chrdev_region(devno, LED_NUM); //取消注册
printk("Led exit\n");
}
module_init(led_init); //模块加载入口 对应命令insmod
module_exit(led_exit); //模块卸载入口 对应命令rmmod
MODULE_LICENSE("Dual BSD/GPL"); //免费开源声明
平台设备框架


将驱动中的硬件信息剥离出来,放到设备树文件中
1. 寄存器的地址值是根据芯片手册 和原理图找到的
2. 对寄存器地址内容操作不能直接使用物理地址,需要ioremap
3. ioremap 将物理地址 映射到虚拟地址
4. platform 用于将硬件信息 和驱动代码做分离
5. 通过名字匹配,匹配成功执行 probe函数
6. 驱动通过 platform_get_resource 获取硬件设备资源
7. 作用 容易维护07植根文件系统制作(根文件系统基本概念,根文件系统设备,访问根文件系统制作)
1.根文件系统基本概念
1.1什么是根文件系统?
- 根文件系统(root filesystem)是存放运行、维护系统所必须的各种工具软件、库文件、脚本、配置文件和其他特殊文件的地方,也可以安装各种软件包。
- 整个系统起来之后运行的第一个文件系统
- 根文件系统下还可以搭建其他的文件系统
1.2根文件系统主要目录结构

1.3程序文件的放置
程序文件目录
/bin: 普通用户和root用户都能执行的基本程序
ping, mknod, mount, tar, grep, gzip, etc
/sbin: root用户能执行的基本程序
int, insmod, route, mkfs, rmmod, ifconfig
/usr/bin: 更多非必须的用户程序
autorun, bibtex, latex, biff, ftp, wc, whereis, whoami
/usr/sbin: 更多非必须的root工具程序
automount, httpd, in.telnetd, in.talkd, sendmail
1.4定制应用程序
配置基本的linux命令(嵌入式linux通过busybox制作)
cat, chmod, chown, cp, chroot, copi, date, dd, df, dmesg, dos2unix, du, echo, env, expr, find, grep, gunzip, gzip, halt, id, ifconfig, init, insmod等等
配置用户自己的应用
桌面管理器等等
1.5库文件的放置
/lib: 系统和运行基本命令时需要的动态库文件
/usr/lib:所有的其他库
/usr/lib/xxx: 一些工具包的私有库
如:/usr/lib/perl5
2.Linux 设备文件
- Linux 系统中所有的对象(包括设备)都是以文件的形式体现的
- Linux系统中,所有的设备文件(如:设备节点),通常放到 /dev下
- 嵌入式系统中只需要创建必须的设备节点即可
举例
2.1字符设备举例
ls –l /dev/ “c” 指明该设备节点是字符设备
crw-rw---- 1 root uucp 4, 64 Feb 23 2004 /dev/ttyS0 //4表示主设备号,64表示次设备号
crw--w---- 1 jdoe tty 136, 1 Feb 23 2004 /dev/pts/1
crw-------- 1 root root 13, 32 Feb 23 2004 /dev/input/mouse0
crw-rw-rw 1 root root 1, 3 Feb 23 2004 /dev/null
典型设备
keyboards, mice, parallel port, IrDA, Bluetooth port, consoles, terminals, sound, video…
2.2块设备举例
“b” 指明该设备节点是块设备 (ls -l)
brw-rw--- 1 root disk 3, 1 Feb 23 2004 hda1
brw-rw--- 1 jdoe floppy 2, 0 Feb 23 2004 fd0
brw-rw--- 1 root disk 7, 0 Feb 23 2004 loop0
brw-rw--- 1 root disk 1, 1 Feb 23 2004 ram1
brw------- 1 root root 8, 1 Feb 23 2004 sda1
典型块设备
磁盘, ramdisk,SD,U盘等等
2.3设备的主设备号次设备号
- Linux系统是通过主设备号和次设备号来区分设备的
- 主设备号: (major)
内核用来区分哪类设备 - 次设备号: (minor)
区分某类设备中的哪个设备 - 内核中的相关文档 Documentation/devices.txt
3.创建设备节点
-
设备文件不能在加载驱动程序时自动创建,要通过指令创建
-
创建设备文件的一般语法:
$ mknod /dev/<device> [c|b] <major> <minor>
例如:
$ mknod /dev/ttySAC0 c 4 64
$ mknod /dev/hda1 b 3 1
基本的设备节点

4.Linux系统的引导过程

制作根文件系统
5.文件系统制作步骤
- 制作根文件系统的内容
采用Busybox创建基本命令
创建基本的目录/lib /etc /var /tmp /dev /sys /proc等
添加glibc基本动态库
创建基本的设备节点
添加启动配置和脚本程序/etc/inittab /etc/fstab /etc/init.d/rcS - 测试rootfs内容正确性
- 制作需要的rootfs类型的格式
6.BusyBox项目构建系统命令
- BusyBox 项目是由Bruce Perens in 在1996创建的
http://www.busybox.net/
BusyBox 是在 GNU GPL 许可协议下发行的开源软件 - 享有“嵌入式Linux的瑞士军刀”美誉,Erik Andersen先生维护;
- Busybox是一个UNIX系统工具集,它将很多普通的UNIX工具集成到一个很小的可执行文件中,为普通用户提供大多数常用的命令;
- BusyBox常用于制作linux命令 主要指令包括
cat, chmod, chown, cp, chroot, copi, date, dd, df, dmesg, dos2unix, du, echo, env, expr, find, grep, gunzip, gzip, halt, id, ifconfig, init, insmod, etc
7.BusyBox工具安装
linux@linux:~$ cp /mnt/hgfs/Linuxsharexiaomei/busybox-1.22.1.tar.bz2 .
linux@linux:~$ tar -vxf busybox-1.22.1.tar.bz2
linux@linux:~$ cd busybox-1.22.1/
制作根文件系统的内容
$ make menuconfig
Busybox Settings --->
Build Options --->
[*] Build BusyBox as a static binary (no shared libs)
(arm-none-linux-gnueabi-) Cross Compiler prefix 注意 一定要指定交叉编译工具
$ make
$ file busybox 确认编译生成的是 ARM 平台的(显示为ELF 32-bit LSB executable, ARM)

$ make install 安装(默认安装路径为_install)

$ cd _install
$ ls
bin linuxrc sbin usr
$ mkdir dev etc mnt proc var tmp sys root 创建需要的目录

$ cp ~/gcc-4.6.4/arm-arm1176jzfssf-linux-gnueabi/lib/ . -a 注意是lib/
$ du -mh lib 查看lib库的大小
$ rm lib/*.a 裁剪,删除掉静态库文件
$ arm-none-linux-gnueabi-strip lib 裁剪掉调试信息 not recognized 有些库是不能strip的 忽略掉
$ sudo rm lib/libstdc++* 删除不需要的库,确保所有库大小不超过4M
$ du -mh lib 查看lib库的大小 可能 显示3.4M lib (这里确保小于 8M)

$ cp /nfs/rootfs/etc -rf . 拷入成熟的参考配置





$sudo mknod dev/console c 5 1 必须要有 console设备节点

8.测试
看新的根文件系统能否正常挂载到开发板
linux@linux:~/busybox-1.22.1$ mv /nfs/rootfs /nfs/rootfs.ok 把原有的根文件系统备份一下
linux@linux:~/busybox-1.22.1$ sudo cp -rf _install /nfs/rootfs 把新的根文件系统拷贝过去(改名rootfs)
配置文件一
文件 /etc/inittab
#this is run first except when booting in single-user mode.
:: sysinit:/etc/init.d/rcS 指定系统初始化脚本是rcS 也可指定别的名字,但习惯用rcS
# /bin/sh invocations on selected ttys
# start an "askfirst" shell on the console (whatever that may be)
::askfirst:-/bin/sh 指定初始的控制台(启动后进入# 状态)
::restart:/sbin/init
::ctrlaltdel:/sbin/reboot
文件 /etc/init.d/rcS(启动脚本)
#!/bin/sh
# This is the first script called by init process
/bin/mount -a mount all stuff from /etc/fstab
/etc/init.d/rc.local 扩展子脚本
echo /sbin/mdev > /proc/sys/kernel/hotplug 设置系统的hotplug程序为mdev
/sbin/mdev -s
./app.exe //让脚本自动运行你的程序
配置文件二
文件 /etc/fstab
#device mount-point type options dump fsck order
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs defaults 0 0
sysfs /sys sysfs defaults 0 0
tmpfs /dev tmpfs defaults 0 0
文件 /etc/profile
#!/bin/sh
export HOSTNAME=farsight
export USER=root
export HOME=root
export PS1="[$USER@$HOSTNAME \W]\# " 终端前的提示符
PATH=/bin:/sbin:/usr/bin:/usr/sbin
LD_LIBRARY_PATH=/lib:/usr/lib:$LD_LIBRARY_PATH
export PATH LD_LIBRARY_PATH
测试rootfs内容正确性
$ cd /nfs
$ mkdir rootfs
$ cp _install/* rootfs –a
$ chmod 777 /nfs/rootfs/
NFS能挂载成功表示根文件系统 内容基本正确
制作需要的rootfs类型的格式

不同根文件系统详解
nfs rootfs
是网络文件文件系统,通过网线远程挂载一个文件系统,文件系统在远程的电脑上。最大的好处是同步,主要用于开发调试
CRAMFS
只读,不能写。安全性高,某些区域的数据不能改,就可以定义为CRAMFS。
JFFS2和YAFFS2
可读,可写,针对都是flash。JFFS2在小型应用系统用的比较多。JFFS2有一个特点:是一个日志文件系统,用的过程中可以随时掉电。YAFFS2只能针对Nand flash,手机中用的最多的是Nand flash,文件系统就是YAFFS2
EXT2 over RAM disk
把一块内存虚拟成为一个磁盘。内存只能按地址空间像一个buffer一样访问,当应用产品内存比较大而flash比较小时,就可以按这种格式把一块内存虚拟成为一个磁盘
制做EXT2 over RAM disk文件系统
linux@linux:~$ dd if=/dev/zero of=ramdisk bs=1k count=8192
if :(input file)输入文件
/dev/zero :是一个虚拟的设备,从这个设备中读到的数据全是0
of :(output file)输出文件
bs=1k count=8192: 单元大小是1k,数量是8k,就是8M大小

linux@linux:~$ mkfs.ext2 -F ramdisk

linux@linux:~$ sudo mkdir /mnt/initrd
将这个磁盘镜像文件挂载到/mnt/initrd下
注意这里的ramdisk不能存放在rootfs目录中
linux@linux:~$ sudo mount -t ext2 ramdisk /mnt/initrd

将测试好的文件系统里的内容全部拷贝到/mnt/initrd目录下面
linux@linux:~$ sudo cp /nfs/rootfs/* /mnt/initrd/ -a

linux@linux:~$ sudo umount /mnt/initrd

压缩ramdisk为ramdisk.gz并拷贝到/tftpboot下
linux@linux:~$ gzip --best -c ramdisk > ramdisk.gz

linux@linux:~$ mkimage -n "ramdisk" -A arm -O linux -T ramdisk -C gzip -d ramdisk.gz ramdisk.img
linux@linux:~$ cp ramdisk.img /tftpboot/

制作完ramdisk.img后,需配置内核支持RAMDISK作为启动文件系统
make menuconfig
File systems --->
<*> Second extended fs support
Device Drivers --->
SCSI device support --->
<*> SCSI disk support
[*] Block devices --->
<*> RAM block device support
(16) Default number of RAM disks
(8192) Default RAM disk size (kbytes) (修改为8M)
General setup --->
[*] Initial RAM filesystem and RAM disk (initramfs/initrd) support
重新编译内核,复制到/tftpboot


更多推荐
 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)