
ROS学习笔记(一):自己动手写一个ROS程序
最近老板安排任务,要把ROS框架在ARM+FPGA平台上实现。但是使用ROS创建程序步骤繁琐,所以这次将官方文档上面的Demo简化写下来,方便以后查看。ROS版本:HydroLinux版本:Ubuntu12.04在开始第一个ROS(Robot Operating System)程序之前,确保已经按照官方教程(点击打开链接)成功安装了ROS。本文建立的是一个非常简单的发布(P
/****************************************************************************/
*
* (c) 光明工作室 2017-2037 COPYRIGHT
*
* 光明工作室团队成员大部分来自全国著名985、211工程院校。具有丰富的工程实践经验,
*本工作室热忱欢迎大家的光临。工作室长期承接嵌入式开发、PCB设计、算法仿真等软硬件设计。
*
*
*1)基于C8051、AVR、MSP430单片机开发。
*2)基于STM32F103、STM32F407等ARM处理器开发。(IIC、SPI、485、WIFI等相关设计)
*3)基于C6678、DM388等DSP处理器开发。(视频、网络、通信协议相关设计)
*4)基于QT、C#软件开发。
*5)基于OPENCV、OPENGL图像处理算法开发。(基于LINUX、WINDOWS、MATLAB等)
*6)无人机飞控、地面站程序开发。(大疆、PIX、 qgroundcontrol、missionplanner、MAVLINK)
*7) ROS机器人操作系统下相关开发。
*8)LINUX、UCOSII、VXWORKS操作系统开发。
*
*
* 联系方式:
* QQ:2468851091 call:18163325140
* Email:2468851091@qq.com
*
/ ****************************************************************************/
最近老板安排任务,要把ROS框架在ARM+FPGA平台上实现。但是使用ROS创建程序步骤繁琐,所以这次将官方文档上面的Demo简化写下来,方便以后查看。
ROS版本:Hydro
Linux版本:Ubuntu12.04
在开始第一个ROS(Robot Operating System)程序之前,确保已经按照官方教程(点击打开链接)成功安装了ROS。本文建立的是一个非常简单的发布(Publisher)、订阅(Subscriber)程序。
创建一个工作区(workspace)
工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件、编译文件和执行文件。建立工作区的方法如下:
虽然这时候工作区是空的,但是我们依然可以进行编译:
这时候,会在当前文件夹下生成devel,build这两个子文件夹,在devel文件夹下能看到几个setup.*sh文件。
接下来把工作区在bash中注册
要验证是否已经在bash中注册可以使用如下命令:
如果能看到自己工作区的文件路径就说明已经成功了。
创建一个ROS工程包(Package)
在一个工作区内,可能会包含多个ROS工程包。而最基本ROS工程包中会包括CmakeLists.txt和Package.xml这两个文件,其中Package.xml中主要包含本项目信息和各种依赖(depends),而CmakeLists.txt中包含了如何编译和安装代码的信息。
首先切换到工作区:
现在可以使用catkin_create_pkg命令去创建一个叫beginner_tutorials的包,这个包依靠std_msgs、roscpp、rospy。
接下来在工作区编译这个工程包。
一个简单的发布(Publisher)、订阅(Subscriber)程序
写一个发布(Publisher)节点
节点(node)是连接到ROS网络中可执行的基本单元。我们在这创建一个发布者---“talker”节点,这个节点持续对外发布消息。
首先我们要把目录切换到我们的beginner_tutorials工程包中
因为我们已经编译过这个工程包了,所以会在beginner_tutorials文件夹下看到CmakeList.txt、package.xml文件和include、src这两个目录。接下来进入src子目录
在src目录中创建一个talker.cpp文件,里面的内容如下:
写一个订阅(Subscriber)节点
还是在src目录下,创建一个listener.cpp文件。内容如下:
编译创建的节点
在编译我们创建的节点之前,我们还需要编辑Cmakelist.txt文件(注意:是beginner_tutorials项目包下的CMakelist文件),告诉编辑器我们需要编辑什么文件,需要什么依赖。
在文件末尾添加如下语句:
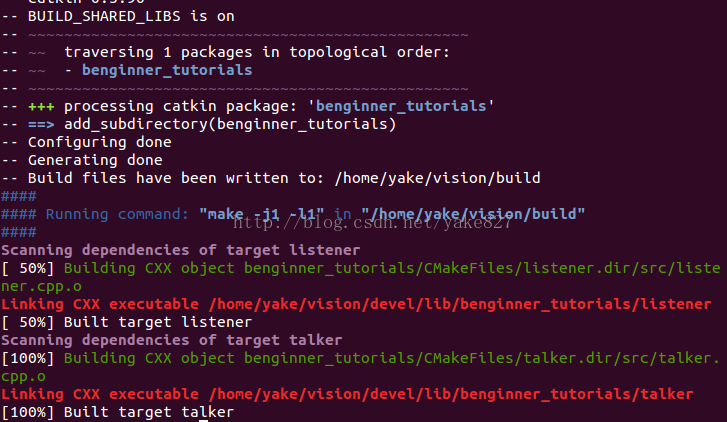
将目录切换到工作区目录,并执行catkin_make运行命令:
不出意外的话,会出现如下界面:
至此,程序已经创建完成,而接下来我们要检查一下我们创建的程序是否正确。
测试程序的正确性
在使用我们的程序之前,需要先把程序注册
运行talker节点:
这时候会看到如下信息:
这时候会看到如下信息:
更多推荐
 3
3 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)