
智能车方向控制原理与实践指南
·

从人工驾驶到自动控制
想象一下你开车时的场景:眼睛观察道路,大脑判断方向,双手转动方向盘。这就是典型的人工控制系统。要让智能车自主行驶,我们需要用电子设备模拟这个过程。

智能车方向控制的核心组件
智能车的方向控制系统主要由以下几个关键部分组成:
- 感知模块:相当于人的眼睛,通常使用摄像头或电磁传感器
- 决策模块:相当于人的大脑,由单片机实现
- 执行机构:相当于人的双手,主要是舵机和驱动电机

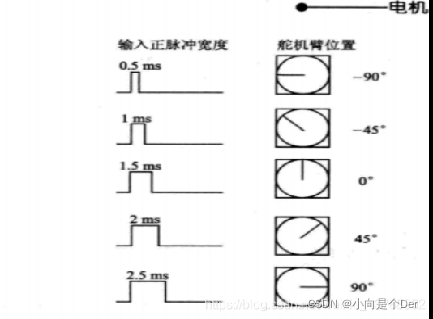
舵机控制的关键技术
PWM信号详解
舵机通过PWM信号控制转向角度,典型的S3010舵机需要: - 周期:20ms(50Hz) - 中值脉宽:1.52ms(占空比7.6%)

舵机参数设置要点
- 中值校准:确保机械安装前舵机处于理论中值位置
- 限幅保护:设置左右极限值,防止舵机过载
- 转向控制:通过调整PWM脉宽实现精确转向
控制算法实现
偏差计算
以电磁传感器为例,常用差比和算法计算偏差:
// 差比和计算偏差
L=adc_once(ADC_P00, ADC_10BIT); //左电感值
M=adc_once(ADC_P01, ADC_10BIT); //中间电感值
R=adc_once(ADC_P05, ADC_10BIT); //右电感值
My_Direction.NowError=50*(R-L)/(L+M+R);PD控制器实现
典型的离散PD控制器实现方式:
void Direction_Out(void)
{
My_Direction.KP=10.0;
My_Direction.KD=2.5;
//转向PD控制
My_Direction.SumError=My_Direction.KP*My_Direction.NowError+\
My_Direction.KD*(My_Direction.NowError-My_Direction.PrevError);
My_Direction.PrevError=My_Direction.NowError;
...
Price_PWM=(int16)(My_Direction.Direct_Parameter);
}实际调试经验分享
- 参数调整顺序:先调P参数确定响应速度,再调D参数抑制震荡
- 机械安装要点:确保舵机中值与车轮直行位置严格对应
- 安全保护措施:务必设置PWM输出限幅

总结与展望
智能车方向控制是一个系统工程,需要硬件、软件和控制理论的有机结合。通过不断调试和优化,可以实现稳定可靠的自动行驶功能。后续还可以探索更先进的控制算法和传感器融合技术。

音视频技术社区,一个全球开发者共同探讨、分享、学习音视频技术的平台,加入我们,与全球开发者一起创造更加优秀的音视频产品!
更多推荐
 0
0 0
0- 0



 已为社区贡献81条内容
已为社区贡献81条内容

所有评论(0)