
3. OpenClaw自定义skill通过环境变量传参
1. 目录结构
skill主要存放在三个地方:1)捆绑类skill,通过npm安装,一般在npm的modules目录下,看你是全局还是局部安装;2)本地skill,存放在OpenClaw主目录下的skills文件夹,目录为"~/.openclaw/skills";3)workspace skill,存放在"<workspace>/skill"目录下。
优先级是类别3最高,即workspace下的skill拥有最高优先级,其次是2,然后是1默认捆绑的skill。同名skill冲突时,OpenClaw按照这个优先级进行处理。看官方文档,说是还可以关联外部目录,通过"~/.openclaw/openclaw.json"的"skills.load.extraDirs"参数进行配置,这个优先级最低。
除了优先级,还有一点不同的是,"workspace"下的skill相当于私有的,仅对当前的agent的有效,而类别2,就是根目录下的skills是共享的,所有agent的都可以使用。
注意:“~/.openclaw” 对应的是linux的目录,"~"代表当前用户的根目录,对于windows平台,也是一致的,对应"C:\Users[用户名]"目录,后面不再解释。
1.1 skill文件布局
my-skill/
├── SKILL.md # Required: instructions + metadata
├── scripts/ # Optional: executable code
├── references/ # Optional: documentation
└── assets/ # Optional: templates, resources
SKILL.md是必须存在的,其他都是可选的,如果说SKILL.md的内容过长,最好的办法就是分割成多个文件,放到“references”目录下,在SKILL.md文件中引用,这样做的好处是让模型在读取的时候,消耗的token少些,模型会按照需求读取引用的文件。
2. SKILL.md
这个文件是必须的,描述技能的功能和触发条件,需要采用yaml和markdown两种格式编写。
开始部分描述skill的主要功能,“—”开始,“—”结束,描述语言为yaml格式,有如下字段:
| 字段名 | 必须存在 | 描述 |
|---|---|---|
| name | Yes | 描述skill的名称,64个字符以内,小写字母(a-z)和(-)的混合体,字母开头 |
| description | Yes | 描述skill能做什么,什么时候触发,这个很关键 |
| license | No | license描述,可以关联单独的文件 |
| metadata | No | 元数据配置,比如需要哪些环境变量,需要提前装哪个程序 |
2.1 metadata配置
| key | 描述 |
|---|---|
| emoji | 设置macOS skills UI图标 |
| homepage | 配置URL地址 |
| os | 当前skill支持的os列表,例如(darwin,linux,win32),如果目标系统不在os列表中,skill会被禁用,数组格式 |
| requires.bins | 提供一个程序列表,所有程序必须保证在PATH范围内能找到,数组格式 |
| requires.anyBins | 提供一个程序列表,在PATH范围内至少存在一个,数组格式 |
| requires.env | 需要提供的环境变量列表,如果不存在,skill就会被禁用,数组格式 |
| primaryEnv | env变量名关联到skills.entries..apiKey |
| install | 安装器配置,支持brew、node、go等 |
3. 更新
3.1 更新SKILL.md
name修改的更规范些,按照官方标注,修改为小写字母和“-”的组合,增加metadata字段,导入环境变量信息,其他非必要字段我都删除了,如下:
---
name: smart-plug-control
description: Smart plug control skill for turning plug on/off. Triggers on phrases like "turn off plug", "turn on plug", "打开插座", "关闭插座", or similar plug control commands.
metadata:
{
"openclaw":
{
"requires": { "env": ["SMART_PLUG_TOKEN", "SMART_PLUG_IP"] },
"primaryEnv": "SMART_PLUG_TOKEN"
}
}
---
配置好以后,重启openclaw
openclaw gateway restart
切换到skill目录,发现已经能识别到环境变量没有配置,并且状态也被切换到“blocked”,这样我们就能把参数都放在环境变量中,避免泄露了。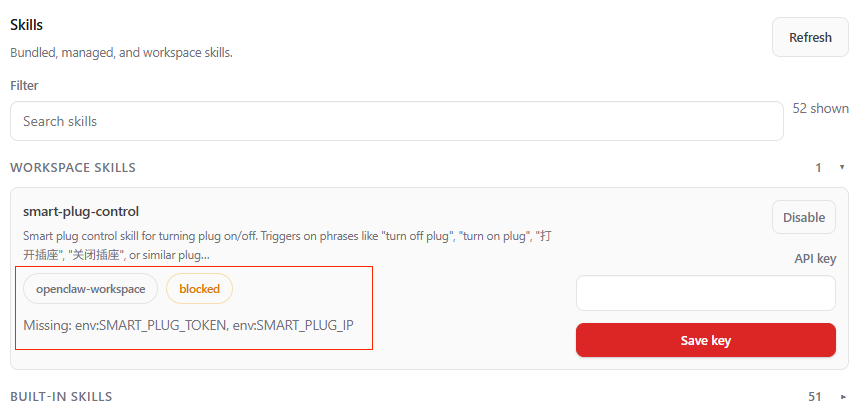
”Save key“执行后,会将参数以明文的方式保存到”openclaw.json“文件中。如果不需要"Save
key"按钮,把"metadata"中"primaryEnv"去掉即可。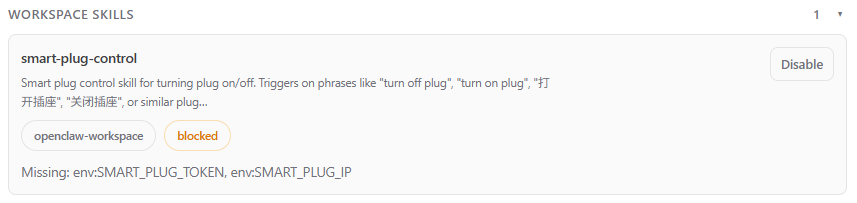
3.2 修改执行脚本
修改脚本,从环境变量获取这些参数,python代码进行一些微量修改:
def get_smart_plug_ip():
return os.environ.get("SMART_PLUG_IP")
def get_smart_plug_token():
return os.environ.get("SMART_PLUG_TOKEN")
# Device configuration
PLUG_IP = get_smart_plug_ip()
PLUG_TOKEN = get_smart_plug_token()
4. 执行测试
4.1 测试1
添加环境变量”SMART_PLUG_IP“和”SMART_PLUG_TOKEN“。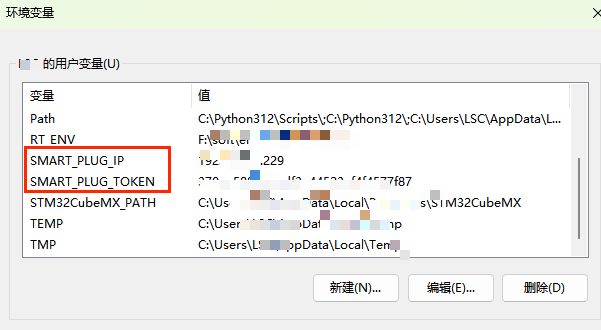
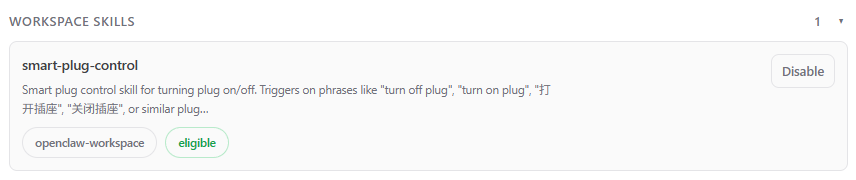
配置环境变量后,再次重启openclaw,效果如下,skill正常了!
执行控制插座指令,开关都正常(参数都配置在环境变量中)。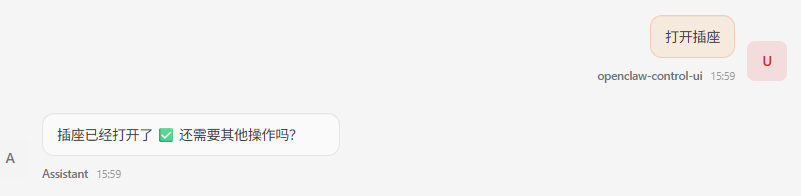
4.2 测试2
删除环境变量”SMART_PLUG_TOKEN“,重启openclaw,skill变为”blocked“状态。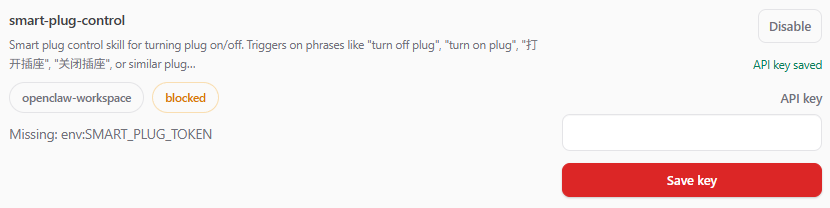
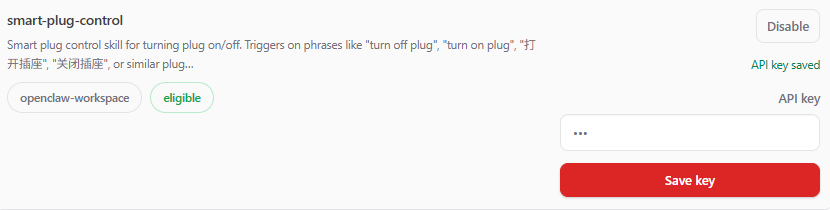
通过”save key“配置token,会关联到”SMART_PLUG_TOKEN“,这是由SKILL.md中的”primaryEnv“实现的。比如这里我们配置为”123“,配置后,skill会变为”eligible“有效状态。
但是要提醒的是,这样是以明文配置在"~/openclaw.json"文件中。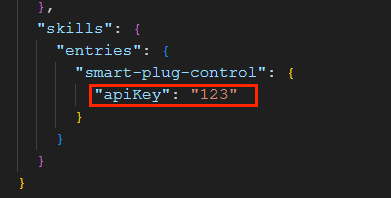
TODO:官方文档说是可以用加密方式配置,暂时还不知道怎么配置,后续研究。

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐


 7
7 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)