
一文读懂滤波器的线性相位,全通滤波器,群延迟
数字信号处理最常见的面试题,请简述FIR和IIR的区别。其中的一个区别是FIR可以方便地实现线性相位。那这个线性相位指的是什么呢?先说结论,**线性相位能保证信号中各频率成分的相对相位关系不改变。通俗解释是:信号经过滤波器后,各个频率分量的延时时间是一样的**。...
一文读懂滤波器的线性相位,全通滤波器,群延迟
数字信号处理最常见的面试题,请简述FIR和IIR的区别。其中的一个区别是FIR可以方便地实现线性相位。那这个线性相位指的是什么呢?本篇博客通过两个例子, 延迟和 全通滤波器,来解释这些概念。
先说结论: 线性相位能保证信号中各频率成分的相对相位关系不改变。
通俗解释: 信号经过线性相位滤波器后,各个频率分量的延时时间是一样的。
该篇博客是 滤波器的相位系列文章第一篇,深入理解可继续阅读《 一文读懂线性相位滤波器和最小相位滤波器》
1. 纯延迟(FIR)
举一个最简单的FIR的例子,延迟。假设16kHz的采样频率,一个采样周期的延迟,可以用FIR来表示。利用Matlab来观看这个滤波器的频率响应,代码如下。采样频率为Fs = 16kHz, 采样周期为Ts,Ts = 1/Fs。其中num是传递函数的分子,den是传递函数的分母。分母只有 a0 = 1, 代表是一个FIR滤波器。分子b0 = 0, b1 = 1, 代表是一个采样点的延迟。
num = [0,1]
den = [1,0]
fvtool(num,den)
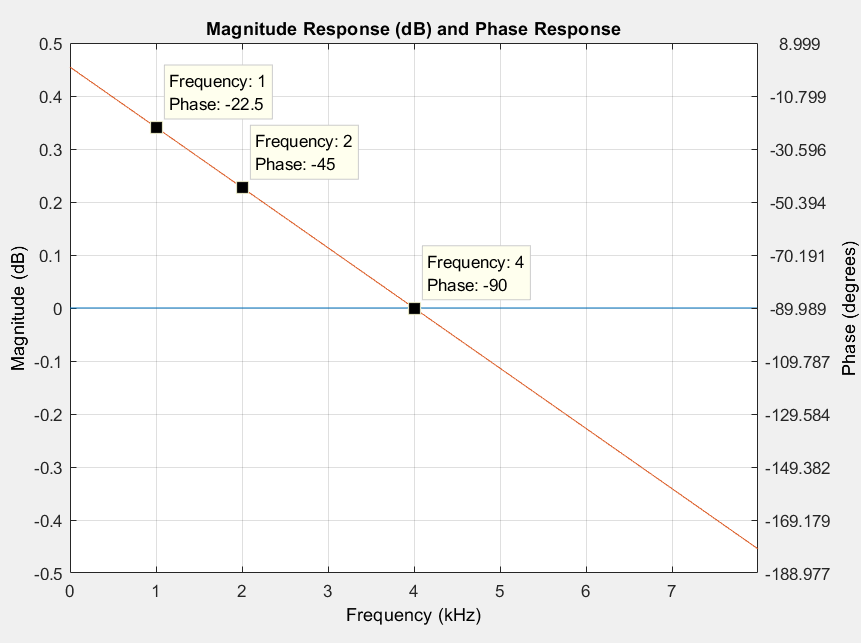
下图中,蓝色的实线表示的幅频响应,为0dB。红色实线表示相频响应,主要看相频响应。图中对1k,2k,4kHz频点的横纵坐标有截图,16kHz采样率下,1kHz的正弦信号一个完整的周期(这里说的周期指的是
2
π
2\pi
2π)内会得到16个采样值。一个采样周期的延迟,带来的相位变化是
−
2
π
/
16
=
−
π
/
8
=
−
22.5
°
-2\pi/16=-\pi/8=-22.5\degree
−2π/16=−π/8=−22.5°。而2kHz信号一个完整周期(
2
π
2\pi
2π)内会得到8个采样值,那么一个采样周期的延迟带来的相位变化是
−
2
π
/
8
=
−
π
/
4
=
−
45
°
-2\pi/8=-\pi/4=-45\degree
−2π/8=−π/4=−45°,同理,对4kHz的信号,相位变化是
−
2
π
/
4
=
−
π
/
2
=
−
90
°
-2\pi/4=-\pi/2=-90\degree
−2π/4=−π/2=−90°。下图中也可以得到验证。
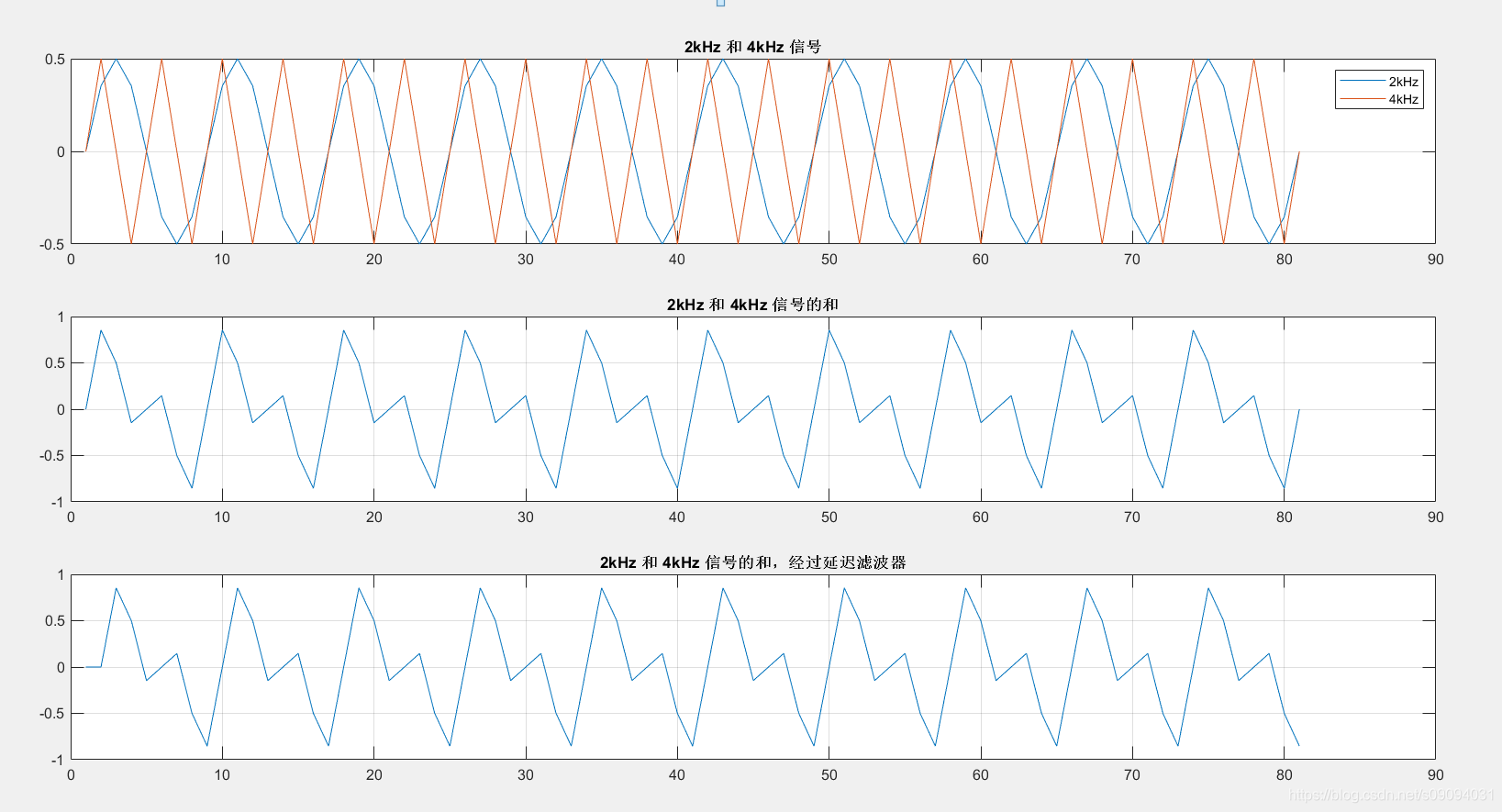
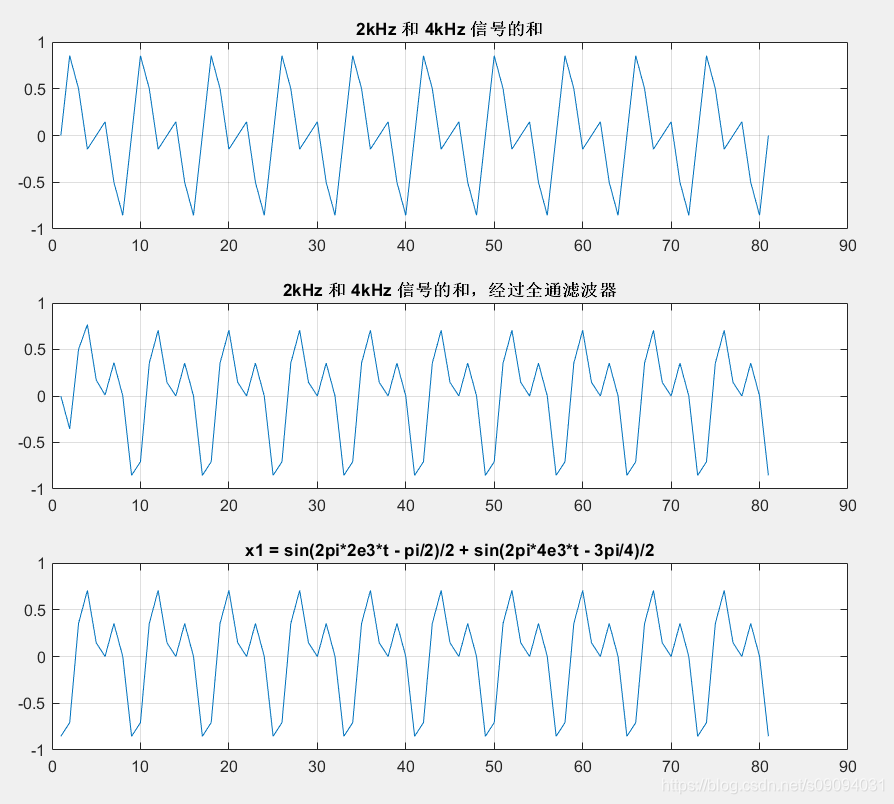
这个滤波器对整个信号只产生了延迟一个采样点的效果,信号的各个频率成分之间的相位关系没有改变。从这个例子可以很清楚地看到,线性相位指的是滤波器对每个频点的相频响应是一个线性关系。如下图所示,上面的图表示2kHz信号和4kHz信号,中间的图表示两者之和,下面的图表示过了一个采样周期延迟的FIR滤波器。中间的图和下面的图,这两个频率成分的信号之间相位关系没有改变。
2. 全通滤波器(IIR)
全通滤波器,幅频响应为0db,但是可以改变个频率成分之间的相位关系。一阶全通滤波器有以下公式。
H
(
z
)
=
c
+
z
−
1
1
+
c
z
−
1
H(z) =\frac{c + z^{-1}}{1 + cz^{-1}}
H(z)=1+cz−1c+z−1
c
=
t
a
n
(
π
∗
f
c
/
f
s
)
−
1
t
a
n
(
π
∗
f
c
/
f
s
)
+
1
c=\frac{tan(\pi*fc/fs) - 1}{tan(\pi*fc/fs) + 1}
c=tan(π∗fc/fs)+1tan(π∗fc/fs)−1其中fc为截止频率,fs为采样频率。
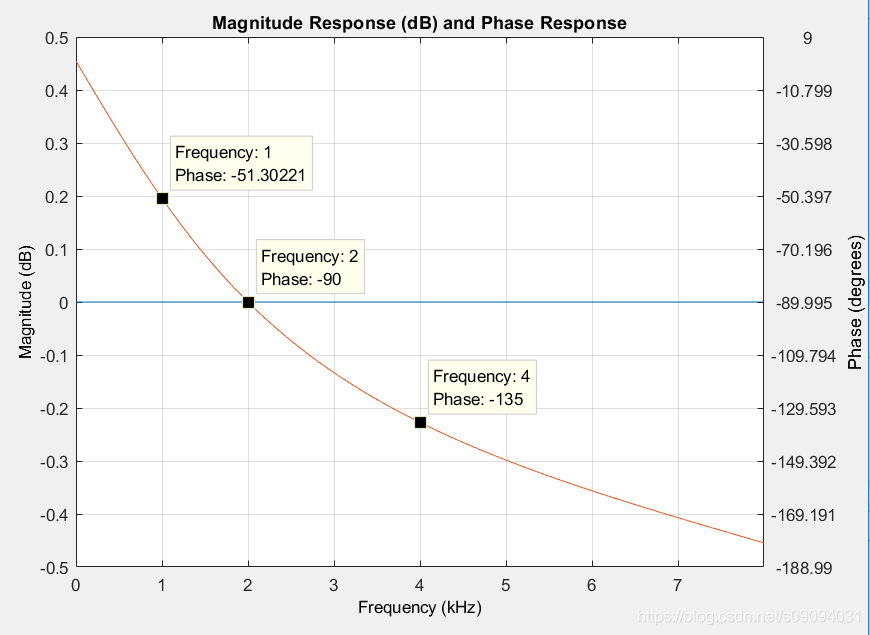
设计一个fc = 2kHz,其幅频相频响应如下图所示。2kHz处幅频响应为
−
π
/
2
-\pi/2
−π/2,4kHz处幅频响应为
−
3
π
/
4
-3\pi/4
−3π/4。很明显,这里已经不再是线性相位了。
fs = 16e3;
fc = 2e3;
c = (tan(pi*fc/fs) - 1)/(tan(pi*fc/fs) + 1)
num = [c,1];
den = [1,c];
fvtool(num,den)
我们再将2kHz和4kHz的和通过这个全通滤波器,看看输出是怎么样的。如下图所示,经过全通滤波器后,2kHz和4kHz信号的相对相位已经改变了。2kHz延迟了
π
/
2
\pi/2
π/2,而4kHz延迟了
3
π
/
4
3\pi/4
3π/4。最下面那幅图直接在输入信号上修改初始相位,也可以得到同样的效果。这里可以看出来,两个频率分量的相对相位关系发生了改变,两者之和的波形也发生了变化。
3.相位延迟和群延迟
以上两个例子可以看出,延迟和全通滤波器都能实现0dB的幅频响应,但相频响应区别很大。相位延迟和群延迟,就是用来描述这种不同。
对于线性时不变系统,输入为
x
(
t
)
=
e
i
w
t
x(t) = e^{iwt}
x(t)=eiwt
输出为
y
(
t
)
=
H
(
i
w
)
e
i
w
t
=
(
∣
H
(
i
w
)
∣
e
i
ϕ
(
w
)
)
e
i
w
t
=
∣
H
(
i
w
)
∣
e
i
(
ϕ
(
w
)
+
w
t
)
y(t) = H(iw)e^{iwt} = (|H(iw)|e^{i\phi(w)})e^{iwt} = |H(iw)|e^{i(\phi(w)+wt)}
y(t)=H(iw)eiwt=(∣H(iw)∣eiϕ(w))eiwt=∣H(iw)∣ei(ϕ(w)+wt)
其中线性系统的相频响应为
ϕ
(
w
)
=
a
r
g
{
H
(
i
w
)
}
\phi(w) = arg\{H(iw)\}
ϕ(w)=arg{H(iw)}
群延迟表示为
τ
g
=
−
d
ϕ
(
w
)
d
w
\tau_g=-\frac{d\phi(w)}{dw}
τg=−dwdϕ(w)
相位延迟表示为
τ
ϕ
=
−
ϕ
(
w
)
w
\tau_\phi=-\frac{\phi(w)}{w}
τϕ=−wϕ(w)
这里先解释群延迟,群延迟是相位对频率的微分。如果群延迟不是一个常数,信号的各频率成分的相对相位关系将发生变化,从而产生相位失真。上面两个例子的群延迟分别如下图所示,纵坐标的单位为采样周期。
延迟(FIR)的群延迟就是1个采样周期的延迟,对于每一个频率分量都是一样的。
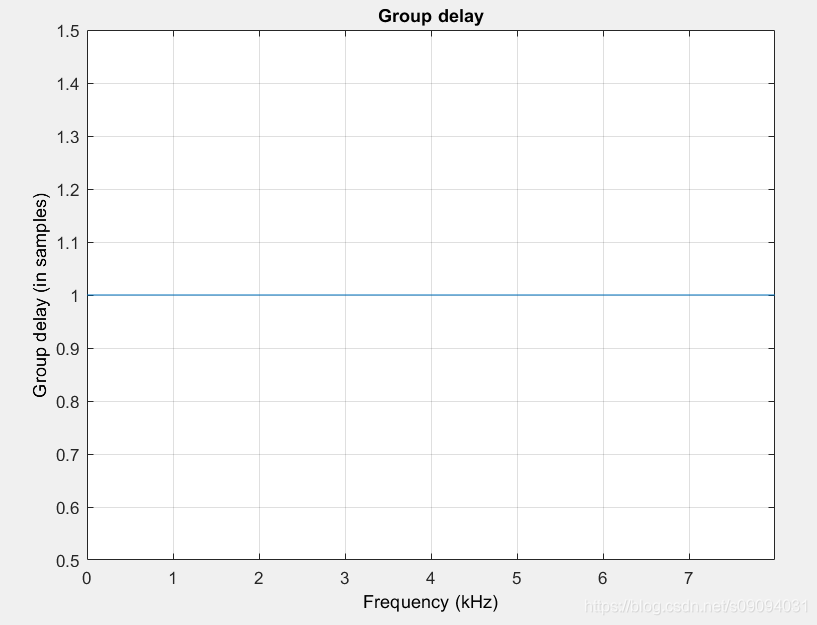
全通滤波器(IIR)的群延迟会随频率变化,低频部分的延迟时间大于高频部分。信号经过这个系统之后,信号各频率成分的相对相位关系就改变了。

4. 实际生活中的例子
就音乐厅来说,如果把舞台上音乐家的歌唱声或乐器发出的声音作为输入,听众听到的上述声音作为输出的话,那么音乐厅可以看成输入输出之间的一个系统。最理想的情况是,输出与输入之间只有一个类似于延时的线性相位滤波器,也即是舞台上唱什么歌,听众就能听到什么歌,只是时间上稍微有滞后。
如果音乐厅这个系统不是线性相位的,会出现什么情况呢?音乐是由很多不同的频率成分构成的。这时候音乐中有些频率成分很快就从舞台上传过来了,有些频率成分则要过一阵才传过来。这样组合起来的音乐,先不论是否悦耳,至少和舞台上的已经不一样了。这时候也就意味着坐在不同位置的听众,听到的将是不同的音乐,这是人们不希望看到的。
同样的问题也会出现在音响系统中。因为音响一般有多路功放来驱动,每一路功放驱动一个频率范围。信号在进入多路功放之前会先经过crossover filter来进行分频,这个分频的过程很有可能带来非线性的相频响应。结果就是音响系统的群延迟并非一个常数。那么不同的乐器演奏的先后顺序会变化,无法准确还原录制时的音乐。
这种情况下,必须要求线性相位的响应。该举例转载于博客《线性相位重要性的理解》。下面这篇博客介绍了线性滤波器在ECG信号中的使用,也是通俗易懂,可以参考。《为什么设计的滤波器一定要用线性相位》
总结:
- 线性相位能保证信号中各频率成分的相对相位关系不改变。通俗解释是:信号经过滤波器后,各个频率分量的延时时间是一样的。
- 延迟(FIR)和全通滤波器(IIR)都能对信号实现0dB的幅频响应。但是FIR能实现线性相位,而且群延迟为一个常数。
- 要让信号传输不失真,这个传输系统必须具有常数幅度增益和线性相位延迟。线性时不变系统只能保证常数倍的幅度增益,并不能保证线性相位延迟。
- 音乐厅的冲激响应必须要求线性相位。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 132
132 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)