
python+dlib+opencv实现图像人物换脸
偶然间看到了别人用蟒实现的换脸代码,很感兴趣就简单研究了下,原理其实不算复杂,最后自己试着用别的方法做了贴图的颜色修改,在此记录下,代码取之网络,用之网络,重在娱乐。目录实验环境:算法步骤:算法详解:代码实验环境:python 3.5.4numpy 1.14.3dlib 19.1.0opencv-python 3.4.1代码的GitHub...
偶然间看到了别人用蟒实现的换脸代码,很感兴趣就简单研究了下,原理其实不算复杂,最后自己试着用别的方法做了贴图的颜色修改,在此记录下,代码取之网络,用之网络,重在娱乐。
目录
实验环境:
- python 3.5.4
- numpy 1.14.3
- dlib 19.1.0
- opencv-python 3.4.1
算法步骤:
- 利用DLIB库检测图像的人脸区域,并提取特征点。
- 根据两张图片提取的特征点,计算变换矩阵。
- 根绝提取的特征点,得到特征点的凸包,以此得到脸部特征区域掩模。
- 修正肤色。
- 根据面膜贴图。
算法详解:
1.人脸区域检测及特征点提取
原文直接调用DLIB库的正脸检测dlib.get_frontal_face_detector(),返回检测到的人脸区域。然后提取该区域内的68个特征点。这里直接用了DLIB训练好的模型shape_predictor_68_face_landmarks.data。
def get_landmarks(im):
rects = detector(im, 1)
if len(rects) > 1:
raise TooManyFaces
if len(rects) == 0:
raise NoFaces
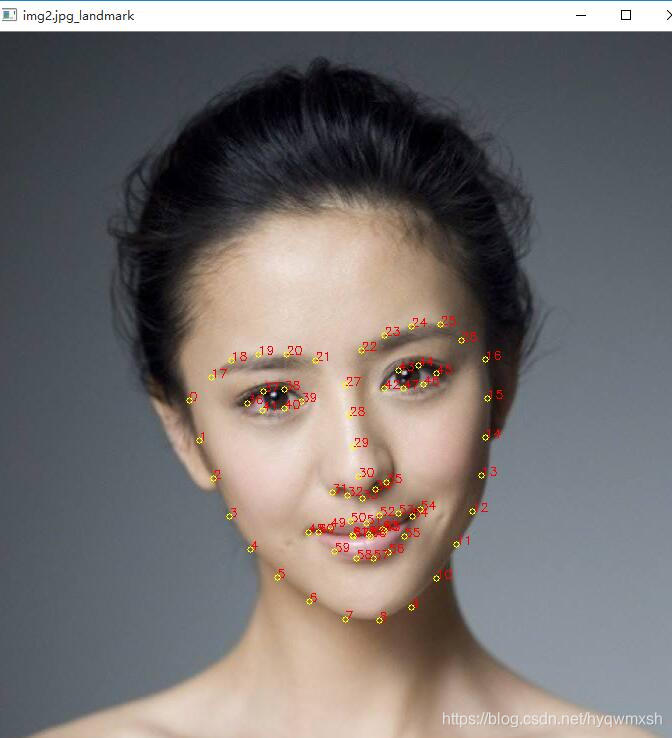
return numpy.matrix([[p.x, p.y] for p in predictor(im, rects[0]).parts()])刚开始看原文代码,对各五官具体标号(FACE_POINTS等)不明白为什么这么划分,然后把特征点依次在图像中标出来,立马清楚了。
结果:

2.计算变换矩阵
为什么需要提取变换矩阵?AB两张图像的人脸特征的大小角度等不会完全一致,直接贴上肯定不和谐,这时候我们需要利用两组特征点计算变换矩阵,使一个的面部特征尽可能与乙的相似。其实这就是仿射变换了。原文利用两组特征点计算,看我的头晕,我这里直接省事修改了下,利用两组特征点的第17,26,57(即左右眉和下嘴唇)点,使用的OpenCV的getAffineTransform函数得到仿射矩阵,然后用warpAffine修正A.这里根据女神丫丫,修正下“宝强”。


3.计算脸部特征区域面具
计算68个特征点的凸包,填充就是掩模。记得掩模也要做仿射变换,且原文中是取两张图像掩模的并集。

4.修正肤色
原文看的蛋疼,用模糊什么的算的好像,我这里改成直方图匹配,A的掩模区域和乙的掩模区域做直方图匹配。效果如下,像个猴屁股,能看出变白了。

5.根据面膜贴图
掩模为1的像素点取宝强,掩模为0的像素点取丫丫。
output_im_hist = im1 * (1.0 - combined_mask) + histMatch_im * combined_mask结果比较惊悚,痕迹明显......(捂脸)

看下用原文代码的效果,感觉效果好点......(捂脸)

好吧,重在娱乐〜
代码
#!/usr/bin/python
import cv2 as cv
import dlib
import numpy as np
from hist_match import histMatch
import sys
PREDICTOR_PATH = 'model/shape_predictor_68_face_landmarks.dat'
SCALE_FACTOR = 1
FEATHER_AMOUNT = 11
FACE_POINTS = list(range(17, 68))
MOUTH_POINTS = list(range(48, 61))
RIGHT_BROW_POINTS = list(range(17, 22))
LEFT_BROW_POINTS = list(range(22, 27))
RIGHT_EYE_POINTS = list(range(36, 42))
LEFT_EYE_POINTS = list(range(42, 48))
NOSE_POINTS = list(range(27, 35))
JAW_POINTS = list(range(0, 17))
# Points used to line up the images.
ALIGN_POINTS = (LEFT_BROW_POINTS + RIGHT_EYE_POINTS + LEFT_EYE_POINTS +
RIGHT_BROW_POINTS + NOSE_POINTS + MOUTH_POINTS)
# Points from the second image to overlay on the first. The convex hull of each
# element will be overlaid.
OVERLAY_POINTS = [
LEFT_EYE_POINTS + RIGHT_EYE_POINTS + LEFT_BROW_POINTS + RIGHT_BROW_POINTS,
NOSE_POINTS + MOUTH_POINTS,
]
TRANSFORM_POINT = [17,26,57]
# Amount of blur to use during colour correction, as a fraction of the
# pupillary distance.
COLOUR_CORRECT_BLUR_FRAC = 0.6
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(PREDICTOR_PATH)
class TooManyFaces(Exception):
pass
class NoFaces(Exception):
pass
def get_landmarks(im ,winname = 'debug'):
rects = detector(im, 1)
if len(rects) > 1:
raise TooManyFaces
if len(rects) == 0:
raise NoFaces
draw = im.copy()
for _, d in enumerate(rects):
cv.rectangle(draw,(d.left(),d.top()),(d.right(),d.bottom()),(0,255,0),3)
return np.matrix([[p.x, p.y] for p in predictor(im, rects[0]).parts()])
def annotate_landmarks(im, landmarks):
im = im.copy()
for idx, point in enumerate(landmarks):
pos = (point[0, 0], point[0, 1])
cv.putText(im, str(idx), pos,
fontFace=cv.FONT_HERSHEY_SCRIPT_SIMPLEX,
fontScale=0.4,
color=(0, 0, 255))
cv.circle(im, pos, 3, color=(0, 255, 255))
return im
def draw_convex_hull(im, points, color):
points = cv.convexHull(points) # 得到凸包
cv.fillConvexPoly(im, points, color=color) # 绘制填充
def get_face_mask(im, landmarks):
im = np.zeros(im.shape[:2], dtype=np.float64)
for group in OVERLAY_POINTS:
draw_convex_hull(im,
landmarks[group],
color=1)
im = np.array([im, im, im]).transpose((1, 2, 0)) #-> rgb rgbr rgb
im = (cv.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0) > 0) * 1.0
im = cv.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0)
return im
# 读取图片文件并获取特征点
def read_im_and_landmarks(fname):
im = cv.imread(fname, cv.IMREAD_COLOR)
im = cv.resize(im, (im.shape[1] * SCALE_FACTOR,
im.shape[0] * SCALE_FACTOR))
# 68个特征点
s = get_landmarks(im,fname) # mat
return im, s
def warp_im(mask, M, dshape):
output_im = np.zeros(dshape, dtype=mask.dtype)
cv.warpAffine(mask,
M[:2],
(dshape[1], dshape[0]),
dst=output_im,
borderMode=cv.BORDER_TRANSPARENT,
flags=cv.WARP_INVERSE_MAP)
return output_im
def getAffineTransform(_srcPoint,_dstPoint):
srcPoint = _srcPoint.astype(np.float32)
dstPoint = _dstPoint.astype(np.float32)
return cv.getAffineTransform(srcPoint,dstPoint)
# im1 贴到im2上
im1, landmarks1 = read_im_and_landmarks(sys.argv[2])
im2, landmarks2 = read_im_and_landmarks(sys.argv[1])
cv.imshow('face1', im1)
cv.imshow('face2', im2)
# 变换矩阵
M = getAffineTransform(landmarks1[TRANSFORM_POINT],landmarks2[TRANSFORM_POINT])
mask = get_face_mask(im2, landmarks2)
warped_mask = warp_im(mask, M, im1.shape)
combined_mask = np.max([get_face_mask(im1, landmarks1), warped_mask],
axis=0) # 两张图片mask并集
warped_im2 = warp_im(im2, M, im1.shape)
histMatch_im = histMatch(warped_im2.astype(np.uint8),im1,mask=combined_mask)
output_im_hist = im1 * (1.0 - combined_mask) + histMatch_im * combined_mask
output_im_hist = output_im_hist.astype(np.uint8)
cv.imshow('changeface', output_im_hist)
cv.waitKey()hist_match .py
import cv2 as cv
import numpy as np
def histMatch_core(src,dst,mask = None):
srcHist = [0] * 256
dstHist = [0] * 256
srcProb = [.0] * 256; # 源图像各个灰度概率
dstProb = [.0] * 256; # 目标图像各个灰度概率
for h in range(src.shape[0]):
for w in range(src.shape[1]):
if mask is None:
srcHist[int(src[h,w])] += 1
dstHist[int(dst[h,w])] += 1
else:
if mask[h,w] > 0:
srcHist[int(src[h, w])] += 1
dstHist[int(dst[h, w])] += 1
resloution = src.shape[0] * src.shape[1]
if mask is not None:
resloution = 0
for h in range(mask.shape[0]):
for w in range(mask.shape[1]):
if mask[h, w] > 0:
resloution += 1
for i in range(256):
srcProb[i] = srcHist[i] / resloution
dstProb[i] = dstHist[i] / resloution
# 直方图均衡化
srcMap = [0] * 256
dstMap = [0] * 256
# 累积概率
for i in range(256):
srcTmp = .0
dstTmp = .0
for j in range(i + 1):
srcTmp += srcProb[j]
dstTmp += dstProb[j]
srcMapTmp = srcTmp * 255 + .5
dstMapTmp = dstTmp * 255 + .5
srcMap[i] = srcMapTmp if srcMapTmp <= 255.0 else 255.0
dstMap[i] = dstMapTmp if dstMapTmp <= 255.0 else 255.0
matchMap = [0] * 256
for i in range(256):
pixel = 0
pixel_2 = 0
num = 0 # 可能出现一对多
cur = int(srcMap[i])
for j in range(256):
tmp = int(dstMap[j])
if cur == tmp:
pixel += j
num += 1
elif cur < tmp: # 概率累计函数 递增
pixel_2 = j
break
matchMap[i] = int(pixel / num) if num > 0 else int(pixel_2)
newImg = np.zeros(src.shape[:2], dtype=np.uint8)
for h in range(src.shape[0]):
for w in range(src.shape[1]):
if mask is None:
newImg[h,w] = matchMap[src[h,w]]
else:
if mask[h,w] > 0:
newImg[h, w] = matchMap[src[h, w]]
else:
newImg[h, w] = src[h, w]
return newImg
# src1 src2 mask must have the same size
def histMatch(src1,src2,mask = None,dst = None):
sB,sG,sR = cv.split(src1)
dB,dG,dR = cv.split(src2)
if mask.shape[2] > 1:
rM,gM,bM = cv.split(mask)
nB = histMatch_core(sB, dB, rM)
nG = histMatch_core(sG, dG, gM)
nR = histMatch_core(sR, dR, bM)
else:
nB = histMatch_core(sB,dB,mask)
nG = histMatch_core(sG,dG,mask)
nR = histMatch_core(sR,dR,mask)
newImg = cv.merge([nB,nG,nR])
if dst is not None:
dst = newImg
return newImg
参考链接:
https://blog.csdn.net/oxuzhenyi/article/details/54982611
http://matthewearl.github.io/2015/07/28/switching-eds-with-python/
http://www.cnblogs.com/konglongdanfo/p/9215091.html

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)