
GitHub 上有哪些机器人、无人机、自动控制等方面的有趣项目
16 个回答默认排序戴泓楷机器人 话题的优秀回答者289 人赞同了该回答我们组正在开发的Drake:RobotLocomotion/drake · GitHub 用于机器人动力学建模,模拟和控制,集成了运动规划,稳定性分析。应用的例子包括了人形机
一键AI生成摘要,助你高效阅读
问答
·
/***************************************************************************************************************/
*
* (c) 光明工作室 2017-2037 COPYRIGHT
*
* 光明工作室团队成员大部分来自全国著名985、211工程院校。具有丰富的工程实践经验,
*本工作室热忱欢迎大家的光临。工作室长期承接嵌入式开发、PCB设计、算法仿真等软硬件设计。
*
*
*1)基于C8051、AVR、MSP430单片机开发。
*2)基于STM32F103、STM32F407等ARM处理器开发。(IIC、SPI、485、WIFI等相关设计)
*3)基于C6678、DM388等DSP处理器开发。(视频、网络、通信协议相关设计)
*4)基于QT、C#软件开发。
*5)基于OPENCV、OPENGL图像处理算法开发。(基于LINUX、WINDOWS、MATLAB等)
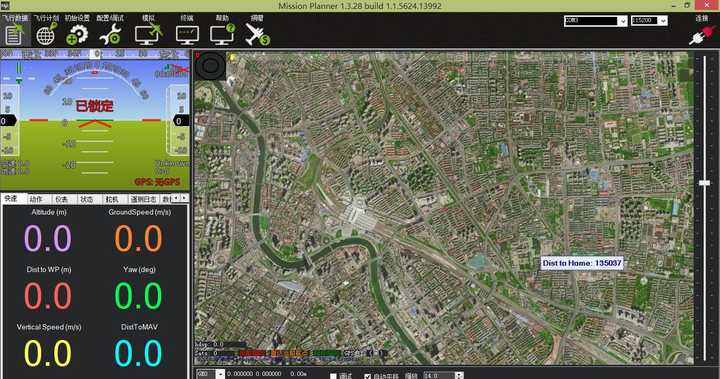
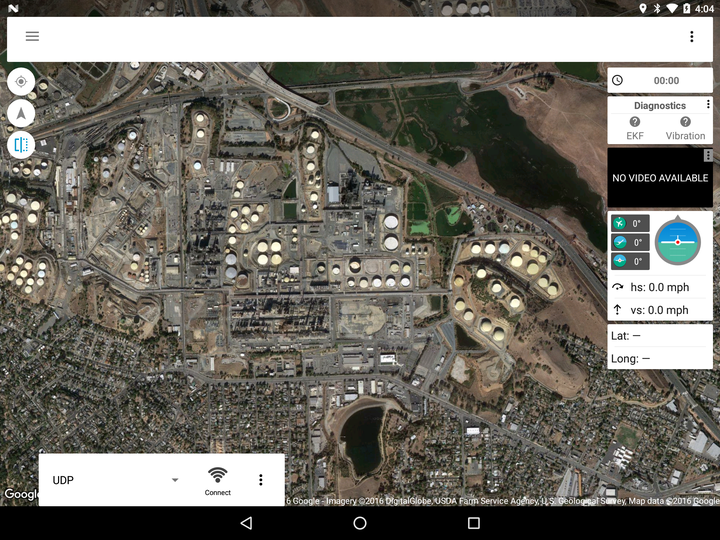
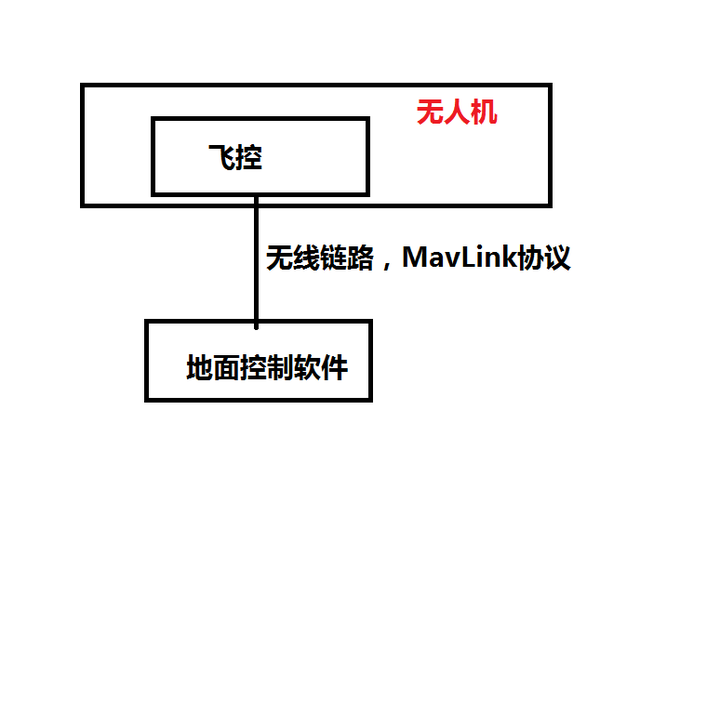
*6)无人机飞控、地面站程序开发。(大疆、PIX、 qgroundcontrol、missionplanner、MAVLINK)
*7) ROS机器人操作系统下相关开发。
*8)LINUX、UCOSII、VXWORKS操作系统开发。
*
*
* 联系方式:
* QQ:2468851091 call:18163325140
* Email:2468851091@qq.com
*
/ ****************************************************************************************************************/
 pose_ekf, 长坐标轴是estimation,短的是ground truth
pose_ekf, 长坐标轴是estimation,短的是ground truth




知乎用户
是来强答的,因为下面说的不一定有趣。
知乎用户

匿名用户

匿名用户
知乎用户

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)