
安信可-A7模块——C语言编程实现GPS功能
上一篇博文整理学习了有关串口通信、串口编程的一些基本知识。本篇将通过编程来获取、解析、转换GPS接收机接收的信息。我们将在fl2440开发板上实现该功能。一、A7与开发板连线我使用的是USB转TTL串口转接线,这里要保证Linux支持了所用的转接芯片。我使用的是cp210的USB转串口芯片,因此要在内核选项中支持它:make menuconfigDevice Drivers->
上一篇博文整理学习了有关串口通信、串口编程的一些基本知识。本篇将通过编程来获取、解析、转换GPS接收机接收的信息。
我们将在fl2440开发板上实现该功能。
一、A7与开发板连线
我使用的是USB转TTL串口转接线,这里要保证Linux支持了所用的转接芯片。我使用的是cp210的USB转串口芯片,因此要在内核选项中支持它:
make menuconfig
Device Drivers->
[*]USB support ->
[*]USB Serial Converter supportUSB CP210x family of UART Bridge Controllers make新内核烧录到开发板,这样开发板就使能了USB驱动。
将串口AT指令控制发送端(U_TXD)和串口AT指令控制接收端(U_RXD)分别与USB转TTL转接头上的RXD和TXD相连,GND与GND相连。另一端接入开发板的USB口即可。
二、打开GPS功能并测试
将A7连上开发板以后,在开发板上使用microcom命令监听相关串口,USB转串口芯片连接则监听串口/dev/ttyUSB0。然后把GPS功能打开:
>: microcom -s 115200 /dev/ttyUSB0
>at //检测模块是否正常
OK
>AT+GPS=1 //打开GPS功能
OK此时将A7模块上的U_TXD连线切换到A7模块上的GPS_TXD引脚,其他连线不变。以波特率为9600重新打开监听串口,将会不断的收到GPS定位的数据。
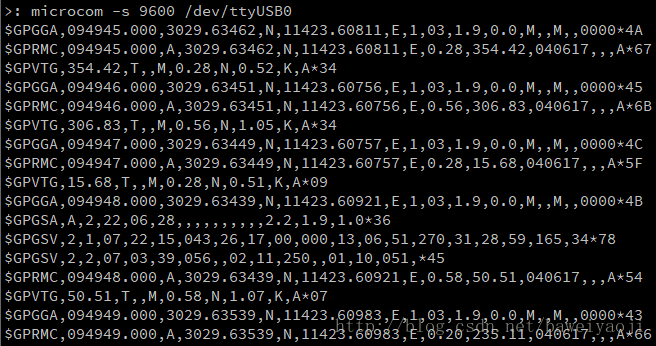
可以看到GPS已经正常工作。
三、编程实现信息获取、解析
首先便是对串口的设置程序s_uart.c。通过串口把数据发送到终端设备,请参考上一篇博文
gps数据分析,gps_analyse.c :
/*********************************************************************************
* Copyright: (C) 2017 TangBin<tangbinmvp@gmail.com>
* All rights reserved.
*
* Filename: gps_analyse.c
* Description: This file
*
* Version: 1.0.0(06/04/2017)
* Author: TangBin <tangbinmvp@gmail.com>
* ChangeLog: 1, Release initial version on "06/04/2017 07:59:41 PM"
*
********************************************************************************/
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <sys/types.h>
#include <errno.h>
#include <sys/stat.h>
#include <fcntl.h>
#include "gps.h"
int gps_analyse (char *buff,GPRMC *gps_data)
{
char *ptr = NULL;
if(gps_data==NULL)
{
return -1;
}
if(strlen(buff)<10)
{
return -1;
}
/*如果buff字符串中包含字符"$GPRMC"则将$GPRMC的地址赋值给ptr*/
if(NULL==(ptr=strstr(buff,"$GPRMC")))
{
return -1;
}
sscanf(ptr,"$GPRMC,%d.000,%c,%f,N,%f,E,%f,%f,%d,,,%c*",&(gps_data->time),&(gps_data->pos_state),&(gps_data->latitude),&(gps_data->longitude),&(gps_data->speed),&(gps_data->direction),&(gps_data->date),&(gps_data->mode));
/*sscanf函数为从字符串输入,上面这句话的意思是将ptr内存单元的值作为输入分别输入到后面的结构体成员*/
return 0;
} /* ----- End of gps_analyis() ----- */
/**************************************************************************************
* Description:
* Input Args:
* Output Args:
* Return Value:
*************************************************************************************/
int print_gps (GPRMC *gps_data)
{
printf(" \n");
printf(" \n");
printf("===========================================================\n");
printf("== 全球GPS定位导航模块 ==\n");
printf("== 开发人员:唐彬 ==\n");
printf("== 邮箱:tangbinmvp@gmail.com ==\n");
printf("== 平台:fl2440 ==\n");
printf("===========================================================\n");
printf(" \n");
printf("===========================================================\n");
printf("== GPS状态位 : %c [A:有效状态 V:无效状态] \n",gps_data->pos_state);
printf("== GPS模式位 : %c [A:自主定位 D:差分定位] \n", gps_data->mode);
printf("== 日期 : 20%02d-%02d-%02d \n",gps_data->date%100,(gps_data->date%10000)/100,gps_data->date/10000);
printf("== 时间 : %02d:%02d:%02d \n",(gps_data->time/10000+8)%24,(gps_data->time%10000)/100,gps_data->time%100);
printf("== 纬度 : 北纬:%d度%d分%d秒 \n", ((int)gps_data->latitude) / 100, (int)(gps_data->latitude - ((int)gps_data->latitude / 100 * 100)), (int)(((gps_data->latitude - ((int)gps_data->latitude / 100 * 100)) - ((int)gps_data->latitude - ((int)gps_data->latitude / 100 * 100))) * 60.0));
printf("== 经度 : 东经:%d度%d分%d秒 \n", ((int)gps_data->longitude) / 100, (int)(gps_data->longitude - ((int)gps_data->longitude / 100 * 100)), (int)(((gps_data->longitude - ((int)gps_data->longitude / 100 * 100)) - ((int)gps_data->longitude - ((int)gps_data->longitude / 100 * 100))) * 60.0));
printf("== 速度 : %.3f m/s \n",gps_data->speed);
printf("== \n");
printf("============================================================\n");
return 0;
} /* ----- End of printf_gps() ----- */对于字段的分析,在上上篇博文已经解读,不过我们要把数据转化一下,方便我们记录和识别。
1. 时间,这个是格林威治时间即世界时间(UTC),把它转换成我们用的北京时间(BTC),在这个时间基础上加8个小时。
2. 经纬度,GPRMC返回的纬度数据位ddmm.mmmm格式即度分格式,我们把它转换成常见的度分秒的格式,计算方法:如接收到的纬度是:3029.60430
3029.60430/100=30.2960430可以直接读出30度, 3029.60430–30*100=29.60430, 可以直接读出29分
(29.60430–29)*60 =0.60430*60=36.258读出36秒, 所以纬度是:30度29分36秒。
3. 南北纬东西经,N:北纬。S:南纬。E:东经。W:西经。
4. 速率,GPRMC返回的速率值是海里/时,单位是节,把它转换成千米/时,换算为:1海里=1.85公里,把得到的速率乘以1.85。
5. 航向,指的是偏离正北的角度
6. 日期,GPRMC的日期格式为:ddmmyy,如:040617表示2017年06月04日,这个日期是准确的,不需要转换。
主函数gps_main.c,这里便涉及到了串口的打开,读操作,以及调用了串口设置函数:
/*********************************************************************************
* Copyright: (C) 2017 TangBin<tangbinmvp@gmail.com>
* All rights reserved.
*
* Filename: gps_main.c
* Description: This file
*
* Version: 1.0.0(06/04/2017)
* Author: TangBin <tangbinmvp@gmail.com>
* ChangeLog: 1, Release initial version on "06/04/2017 08:07:14 PM"
*
********************************************************************************/
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <errno.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <termios.h>
#include <stdlib.h>
#include "gps.h"
#define GPS_LEN 512
int set_serial(int fd,int nSpeed, int nBits, char nEvent, int nStop);
int gps_analyse(char *buff,GPRMC *gps_date);
int print_gps(GPRMC *gps_date);
/********************************************************************************
* Description:
* Input Args:
* Output Args:
* Return Value:
********************************************************************************/
int main (int argc, char **argv)
{
int fd = 0;
int nread = 0;
GPRMC gprmc;
char gps_buff[GPS_LEN];
char *dev_name = "/dev/ttyUSB0";
fd = open(dev_name,O_RDWR|O_NOCTTY|O_NDELAY);
if(fd<0)
{
printf("open ttyUSB0 failed.\n");
return -1;
}
set_serial( fd,9600,8,'N',1);
while(1)
{
sleep(2);
nread = read(fd,gps_buff,sizeof(gps_buff));
if(nread<0)
{
printf("read GPS date error!!\n");
return -2;
}
printf("gps_buff: %s\n", gps_buff);
memset(&gprmc, 0 , sizeof(gprmc));
gps_analyse(gps_buff,&gprmc);
print_gps(&gprmc);
}
close(fd);
return 0;
} /* ----- End of main() ----- */gps.h:
/********************************************************************************
* Copyright: (C) 2017 TangBin<tangbinmvp@gmail.com>
* All rights reserved.
*
* Filename: gps.h
* Description: This head file
*
* Version: 1.0.0(06/04/2017)
* Author: TangBin <tangbinmvp@gmail.com>
* ChangeLog: 1, Release initial version on "06/04/2017 08:10:52 PM"
*
********************************************************************************/
#ifndef __GPS_H__
#define __GPS_H__
typedef unsigned int UINT;
typedef int BYTE;
typedef long int WORD;
typedef struct __gprmc__
{
UINT time;
char pos_state;
float latitude;
float longitude;
float speed;
float direction;
UINT date;
float declination;
char dd;
char mode;
}GPRMC;
extern int gps_analysis(char *buff,GPRMC *gps_date);
extern int print_gps(GPRMC *gps_date);
extern int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop);
#endif
接下来使用Makefile编译,
Makefile:
1 CC=/opt/buildroot-2012.08/arm920t/usr/bin/arm-linux-gcc
2
3 objs=s_uart.o gps_analyse.o gps_main.o
4 srcs=s_uart.c gps_analyse.c gps_main.c
5
6 gps_test: $(objs)
7 $(CC) -o gps_test $(objs)
8 @make clean
9
10 gps_main.o: $(srcs) gps.h
11 $(CC) -c $(srcs)
12
13 set_uart.o: suart.c
14 $(CC) -c s_uart.c
15
16 analyse_gps.o: gps_analyse.c gps.h
17 $(CC) -c gps_analyse.c
18
19 clean:
20 rm *.o[tangbin@localhost gps]$ ls
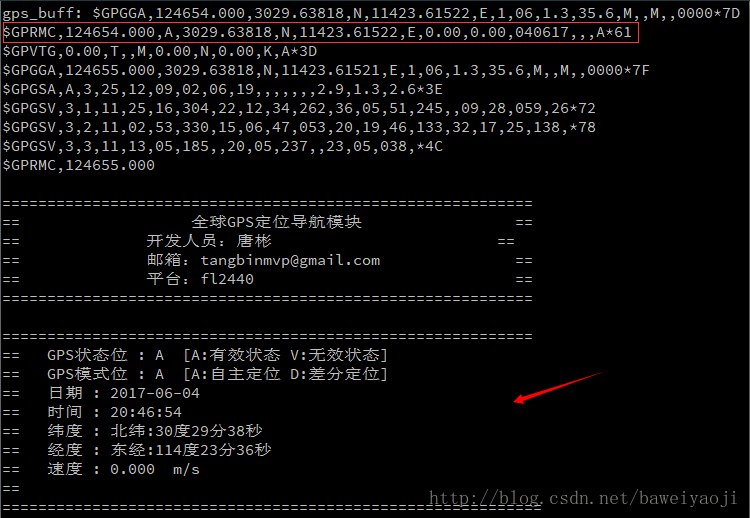
gps_analyse.c gps.h gps_main.c gps_test Makefile s_uart.c将编译生成的gps_test下载到开发板,运行测试:
更多推荐



 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)