
Xiaojie雷达之路---模糊函数
模糊函数(Ambiguity Function)是分析雷达信号和进行波形设计的有效工具。通过研究模糊函数,可以得到在采用最优信号处理技术和发射某种特定信号的条件下,雷达系统所具有的分辨率、模糊度、测量精度和抗干扰能力。...
模糊函数(Ambiguity Function)是分析雷达信号和进行波形设计的有效工具。通过研究模糊函数,可以得到在采用最优信号处理技术和发射某种特定信号的条件下,雷达系统所具有的分辨率、模糊度、测量精度和抗干扰能力。
模糊函数的定义及其性质
模糊函数的定义
模糊函数最初是为了研究雷达分辨率而提出的,目的是通过这一函数定量描述当系统工作于多目标环境下,发射一种波形并采用相应的滤波器时,系统对不同距离、不同速度目标的分辨能力。换句话说,就是当"干扰目标"与观测目标之间存在着距离和速度差别时,模糊函数定量地表示了"干扰目标"(即临近地目标)对观测目标的干扰程度。
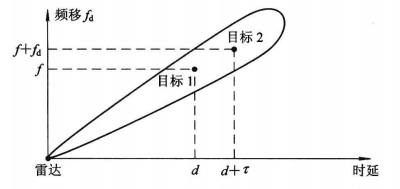
下面从分辨两个不同的目标出发,如下图所示,以最小均方差为最佳分辨准则,推导模糊函数的定义式。
雷达的发射信号通常为窄带信号,用复信号可表示为
s t ( t ) = u ( t ) e j 2 π f 0 t s_t(t)=u(t)e^{j2\pi f_0 t} st(t)=u(t)ej2πf0t
其中, u ( t ) u(t) u(t)为信号复包络, f 0 f_0 f0为载频
若采用理想的"点目标"模型,假设目标1和目标2的时延分别为 d d d+ d + τ d+\tau d+τ,多普勒频移分别为 f f f+ f + f d f+f_d f+fd,且功率相同,两个目标的回波信号可表示为
s r 1 ( t ) = u ( t − d ) e j 2 π ( f 0 + f ) ( t − d ) s_{r1}(t)=u(t-d)e^{j2\pi(f_0+f)(t-d)} sr1(t)=u(t−d)ej2π(f0+f)(t−d)
s r 2 ( t ) = u ( t − ( d + τ ) ) e j 2 π ( f 0 + ( f + f d ) ) ( t − ( d + τ ) ) s_{r2}(t)=u(t-(d+\tau))e^{j2\pi(f_0+(f+f_d))(t-(d+\tau))} sr2(t)=u(t−(d+τ))ej2π(f0+(f+fd))(t−(d+τ))
于是,两个目标回波的均方差可表示为
ξ 2 = ∫ − ∞ ∞ ∣ u ( t − d ) e j 2 π ( f 0 + f ) ( t − d ) − u ( t − ( d + τ ) ) e j 2 π ( f 0 + ( f + f d ) ) ( t − ( d + τ ) ) ∣ 2 d t = ∫ − ∞ ∞ ∣ u ( t − d ) ∣ 2 d t + ∫ − ∞ ∞ ∣ u ( t − ( d + τ ) ) ∣ 2 d t − 2 R e ∫ − ∞ ∞ u ∗ ( t − d ) u ( t − ( d + τ ) ) e j 2 π ( f d ( t − d ) − ( f 0 + f + f d ) τ ) d t \xi ^2=\int_{-\infty}^{\infty}|u(t-d)e^{j2\pi(f_0+f)(t-d)}-u(t-(d+\tau))e^{j2\pi(f_0+(f+f_d))(t-(d+\tau))}|^2dt \\ =\int_{-\infty}^{\infty}|u(t-d)|^2dt+\int_{-\infty}^{\infty}|u(t-(d+\tau))|^2dt-2Re\int_{-\infty}^{\infty}u^*(t-d)u(t-(d+\tau))e^{j2\pi (f_d(t-d)-(f_0+f+f_d)\tau)}dt\\ ξ2=∫−∞∞∣u(t−d)ej2π(f0+f)(t−d)−u(t−(d+τ))ej2π(f0+(f+fd))(t−(d+τ))∣2dt=∫−∞∞∣u(t−d)∣2dt+∫−∞∞∣u(t−(d+τ))∣2dt−2Re∫−∞∞u∗(t−d)u(t−(d+τ))ej2π(fd(t−d)−(f0+f+fd)τ)dt
做变量代换,令 t ′ = t − ( d + τ ) t'=t-(d+\tau) t′=t−(d+τ),并将 ∫ − ∞ ∞ ∣ u ( t − d ) ∣ 2 d t \int_{-\infty}^{\infty}|u(t-d)|^2dt ∫−∞∞∣u(t−d)∣2dt和 ∫ − ∞ ∞ ∣ u ( t − ( d + τ ) ) ∣ 2 d t \int_{-\infty}^{\infty}|u(t-(d+\tau))|^2dt ∫−∞∞∣u(t−(d+τ))∣2dt用 2 E 2E 2E代换,上式可简化为
ξ 2 = 2 ( 2 E − R e ( e − j 2 π ( f 0 + f ) τ ∫ − ∞ ∞ u ( t ′ ) u ∗ ( t ′ + τ ) e j 2 π f d t ′ d t ′ ) ) \xi ^2=2 (2E-Re(e^{-j2\pi (f_0+f)\tau}\int_{-\infty}^{\infty}u(t')u^*(t'+\tau)e^{j2\pi f_d t'}dt')) ξ2=2(2E−Re(e−j2π(f0+f)τ∫−∞∞u(t′)u∗(t′+τ)ej2πfdt′dt′))
将上式中积分项定义为
χ ( τ , f d ) = ∫ − ∞ ∞ u ( t ) u ∗ ( t + τ ) e j 2 π f d t d t \chi (\tau,f_d)=\int_{-\infty}^{\infty}u(t)u^*(t+\tau)e^{j2\pi f_dt}dt χ(τ,fd)=∫−∞∞u(t)u∗(t+τ)ej2πfdtdt
这就是模糊函数的表达式。可见射频信号 s t ( t ) s_t(t) st(t)的模糊函数取决于其复包络 u ( t ) u(t) u(t)的模糊函数。可改写为
ξ 2 = 2 ( 2 E − R e ( e − j 2 π ( f 0 + f ) τ χ ( τ , f d ) ) ) ≥ 2 [ 2 E − ∣ χ ( τ , f d ) ∣ ] \xi ^2=2 (2E-Re(e^{-j2\pi (f_0+f)\tau}\chi (\tau,f_d))) \ge 2[2E-|\chi (\tau,f_d)|] ξ2=2(2E−Re(e−j2π(f0+f)τχ(τ,fd)))≥2[2E−∣χ(τ,fd)∣]
考虑到分辨目标一般是在检波之后进行,上式表明: ∣ χ ( τ , f d ) ∣ |\chi (\tau,f_d)| ∣χ(τ,fd)∣为两个相邻目标回波信号的均方差提供了一个保守的估计。也就是说, ∣ χ ( τ , f d ) ∣ |\chi (\tau,f_d)| ∣χ(τ,fd)∣是决定相邻目标距离-速度联合分辨率的唯一因素
有的文献从匹配滤波器的输出出发,定义了不同形式的模糊函数
χ ( τ , f d ) = ∫ − ∞ ∞ u ( t ) u ∗ ( t − τ ) e j 2 π f d t d t \chi (\tau,f_d)=\int_{-\infty}^{\infty}u(t)u^*(t-\tau)e^{j2\pi f_dt}dt χ(τ,fd)=∫−∞∞u(t)u∗(t−τ)ej2πfdtdt
按照国际上的统一建议,称从分辨角度出发定义的模糊函数为正型模糊函数,而称从匹配滤波器输出得到的定义式为负型模糊函数。
在没有噪声的情况下,最优滤波器的输出为模糊函数的再现,不同之处只是峰值点不在原点,对应的时延与频移发生了偏移。模糊函数图的峰值在原点;对目标回波而言,最优滤波器输出的峰值对应的位置为目标的距离和多普勒频率。
一般匹配滤波器的输出都经过线性检波器取出包络值,所以用 ∣ χ ( τ , f d ) ∣ 2 |\chi (\tau,f_d)|^2 ∣χ(τ,fd)∣2来表示包络检波器的作用。而在实际分辨目标时,常采用功率响应 ∣ χ ( τ , f d ) ∣ 2 |\chi (\tau,f_d)|^2 ∣χ(τ,fd)∣2更方便。也就是说,波形的分辨特性由匹配滤波器响应平方决定。因而有的文献也把 ∣ χ ( τ , f d ) ∣ |\chi (\tau,f_d)| ∣χ(τ,fd)∣和$|\chi (\tau,f_d)|^2统一称为模糊函数。
利用帕塞瓦尔(Parseval)定理及傅立叶变换性质,还可以写为另一种形式
χ ( τ , f d ) = ∫ − ∞ ∞ U ( f − f d ) U ∗ ( f ) e − j 2 π f τ d f \chi (\tau,f_d) = \int_{-\infty}^{\infty}U(f-f_d)U^*(f)e^{-j2\pi f\tau}df χ(τ,fd)=∫−∞∞U(f−fd)U∗(f)e−j2πfτdf
用三维图形表示的模糊函数称为模糊函数图,它全面表达了相邻目标的模糊度。为方便起见,有时也常用模糊度来表示模糊函数,它是幅度归一化模糊函数图在某一高度上(如-6dB)的二维截面图,也称为模糊椭圆
模糊函数的性质
模糊函数有一些重要的性质,可以用来分析一些复杂的信号。其主要性质如下:
- 关于原点的对称性,即
∣ χ ( τ , f d ) ∣ = χ ( − τ , − f d ) |\chi (\tau,f_d)|=\chi (-\tau,-f_d) ∣χ(τ,fd)∣=χ(−τ,−fd)
- 在原点取最大值,即
∣ χ ( τ , f d ) ∣ ≤ ∣ χ ( 0 , 0 ) ∣ = 2 E |\chi (\tau,f_d)| \le |\chi (0,0)|=2E ∣χ(τ,fd)∣≤∣χ(0,0)∣=2E
且在原点取值为1,即归一化幅值
- 模糊体积不变性,即
∫ − ∞ ∞ ∫ − ∞ ∞ ∣ χ ( τ , f d ) ∣ 2 d τ d f d = ∣ χ ( 0 , 0 ) ∣ 2 = ( 2 E ) 2 \int_{-\infty}^{\infty}\int_{-\infty}^{\infty}|\chi (\tau,f_d)|^2d\tau df_d=|\chi (0,0)|^2=(2E)^2 ∫−∞∞∫−∞∞∣χ(τ,fd)∣2dτdfd=∣χ(0,0)∣2=(2E)2
该性质说明了模糊曲面的主峰高度和曲面下的总容积只决定于信号能量,而与信号形式无关。
- 自变换特性,即
∫ − ∞ ∞ ∫ − ∞ ∞ ∣ χ ( τ , f d ) ∣ 2 e j 2 π ( f d x − τ y ) d τ d f d = ∣ χ ( x , y ) ∣ 2 \int_{-\infty}^{\infty}\int_{-\infty}^{\infty}|\chi (\tau,f_d)|^2e^{j2\pi (f_dx-\tau y)}d\tau df_d=|\chi (x,y)|^2 ∫−∞∞∫−∞∞∣χ(τ,fd)∣2ej2π(fdx−τy)dτdfd=∣χ(x,y)∣2
该性质说明了模糊函数的二维傅立业变换式仍为某一波形的模糊函数。但是,这个性质并不能用来反证具有自变换性质的函数为模糊函数。
- 模糊体积分布的限制,即
∫ − ∞ ∞ ∣ χ ( τ , f d ) ∣ 2 d τ = ∫ − ∞ ∞ ∣ χ ( τ , 0 ) ∣ 2 e − j 2 π τ f d d τ \int_{-\infty}^{\infty}|\chi (\tau,f_d)|^2d\tau=\int_{-\infty}^{\infty}|\chi (\tau,0)|^2e^{-j2\pi \tau f_d}d\tau ∫−∞∞∣χ(τ,fd)∣2dτ=∫−∞∞∣χ(τ,0)∣2e−j2πτfddτ
∫ − ∞ ∞ ∣ χ ( τ , f d ) ∣ 2 d f d = ∫ − ∞ ∞ ∣ χ ( 0 , f d ) ∣ 2 e j 2 π τ f d d f d \int_{-\infty}^{\infty}|\chi (\tau,f_d)|^2df_d=\int_{-\infty}^{\infty}|\chi (0,f_d)|^2e^{j2\pi \tau f_d}df_d ∫−∞∞∣χ(τ,fd)∣2dfd=∫−∞∞∣χ(0,fd)∣2ej2πτfddfd
该性质表明了模糊体积沿 f d f_d fd轴的分布完全取决于发射信号复包络的自相关函数或信号的能量谱,而与信号的相位谱无关;模糊体积沿 τ \tau τ轴的分布完全取决于发射信号复包络的模值,而与信号的相位调制无关。
- 组合性质:若 c ( t ) = a ( t ) + b ( t ) c(t)=a(t)+b(t) c(t)=a(t)+b(t),则有
χ c ( τ , f d ) = χ a ( τ , f d ) + χ b ( τ , f d ) + χ a b ( τ , f d ) + e − j 2 π f d τ χ a b ∗ ( − τ , − f d ) \chi _c(\tau,f_d)=\chi _a(\tau,f_d)+\chi _b(\tau,f_d)+\chi _{ab}(\tau,f_d)+e^{-j2\pi f_d\tau}\chi _{ab}^{*}(-\tau,-f_d) χc(τ,fd)=χa(τ,fd)+χb(τ,fd)+χab(τ,fd)+e−j2πfdτχab∗(−τ,−fd)
该性质表明了两个信号相加的合成信号的模糊函数除了两个信号本身的模糊函数外,还包括这两个信号的互模糊函数分量。
- 时间和频率偏移的影响:若 v ( t ) = u ( t − t 0 ) e j 2 π f 0 ( t − t 0 ) v(t)=u(t-t_0)e^{j2\pi f_0(t-t_0)} v(t)=u(t−t0)ej2πf0(t−t0),则 v ( t ) v(t) v(t)的模糊函数为
χ v ( τ , f d ) = e j 2 π ( f d t 0 − f 0 τ ) χ u ( τ , f d ) \chi _v(\tau,f_d)=e^{j2\pi(f_dt_0-f_0\tau)}\chi _u(\tau,f_d) χv(τ,fd)=ej2π(fdt0−f0τ)χu(τ,fd)
式中, χ u \chi _u χu为 u ( t ) u(t) u(t)的模糊函数
- 信号周期重复的影响:如果单个脉冲信号 u ( t ) u(t) u(t)的模糊函数为 χ u ( τ , f d ) \chi _u(\tau,f_d) χu(τ,fd),将信号 u ( t ) u(t) u(t)重复 N N N个周期得到的信号 v ( t ) = ∑ i = 0 N − 1 c i u ( t − i T r ) v(t)=\sum_{i=0}^{N-1}c_iu(t-iT_r) v(t)=∑i=0N−1ciu(t−iTr),其中 c i c_i ci表示复加权系数, T r T_r Tr为脉冲重复周期,则 v ( t ) v(t) v(t)的模糊函数为
χ v ( τ , f d ) = ∑ m = 1 N − 1 e j 2 π f d m T r χ u ( τ + m T r , f d ) ∑ i = 0 N − 1 − m c i ∗ c i + m e j 2 π f d i T r + ∑ m = 1 N − 1 χ u ( τ − m T r , f d ) ∑ i = 0 N − 1 − m c i c i + m ∗ e j 2 π f d i T r \chi _v(\tau,f_d)=\sum_{m=1}^{N-1}e^{j2\pi f_dmT_r}\chi _u(\tau+mT_r,f_d)\sum_{i=0}^{N-1-m}c_i^*c_{i+m}e^{j2\pi f_d iT_r}+\sum_{m=1}^{N-1}\chi _u(\tau-mT_r,f_d)\sum_{i=0}^{N-1-m}c_ic_{i+m}^*e^{j2\pi f_d iT_r} χv(τ,fd)=∑m=1N−1ej2πfdmTrχu(τ+mTr,fd)∑i=0N−1−mci∗ci+mej2πfdiTr+∑m=1N−1χu(τ−mTr,fd)∑i=0N−1−mcici+m∗ej2πfdiTr
雷达分辨理论
雷达分辨率是指在各种目标环境下区分两个或两个以上的邻近目标的能力。雷达分辨邻近目标的能力主要从距离、速度、方位和仰角四个方面考虑,其中方位和仰角的分辨率取决于波束宽度。一般雷达难以在四维同时能分辨目标,在其中任意一维能分辨目标就认为具有目标分辨的能力。这里主要分析距离分辨率和速度分辨率与波形参数的关系,通过分辨常数和模糊函数来分析各种波形的分辨性能。
距离分辨率
假定两个目标在同一角度但处在不同距离上,在不考虑相邻目标的多普勒频移时,得到
ξ 2 ≥ 2 ( 2 E − ∣ χ ( τ , 0 ) ∣ ) \xi ^2 \ge 2(2E-|\chi (\tau,0)|) ξ2≥2(2E−∣χ(τ,0)∣)
令 f d = 0 f_d=0 fd=0可知,信号的距离函数为
∣ χ ( τ , 0 ) ∣ = ∣ ∫ − ∞ ∞ u ( t ) u ∗ ( t + τ ) d t ∣ |\chi (\tau,0)|=|\int_{-\infty}^{\infty}u(t)u^*(t+\tau)dt| ∣χ(τ,0)∣=∣∫−∞∞u(t)u∗(t+τ)dt∣
当 τ = 0 \tau = 0 τ=0时, ∣ χ ( τ , 0 ) ∣ |\chi (\tau,0)| ∣χ(τ,0)∣有最大值。距离分辨率由 ∣ χ ( τ , 0 ) ∣ 2 |\chi (\tau,0)|^2 ∣χ(τ,0)∣2的大小来衡量。若存在一些非零的 τ \tau τ值,使得 ∣ χ ( τ , 0 ) ∣ = ∣ χ ( 0 , 0 ) ∣ |\chi (\tau,0)|=|\chi (0,0)| ∣χ(τ,0)∣=∣χ(0,0)∣,那么两个目标是不可分辨的。当 τ ≠ 0 \tau \ne 0 τ=0时, ∣ χ ( τ , 0 ) ∣ |\chi (\tau,0)| ∣χ(τ,0)∣随 τ \tau τ增大而下降的越快,距离分辨性能越好;若要求系统具有高距离分辨率,就要选择合适的信号形式使其通过匹配滤波器(或相关积分器)输出很窄的尖峰,而实际的滤波器的输出包络可能有下图三种形式。

上图(a)的响应的单瓣的,但如果主瓣很宽,邻近目标就难以分辨。上图(b)的响应主瓣很窄,对邻近目标的分辨能力较好,但存在间断离散型旁瓣,若其间距为 Δ τ \Delta \tau Δτ,当目标间距相当于 Δ τ \Delta \tau Δτ的整数倍时,分辨就很困难。上图©的响应主瓣也很尖,但存在类似噪声的基底型旁瓣,虽然基底旁瓣不高,但强目标的响应基底有可能掩盖弱目标的响应主瓣;在多目标环境中,多个目标响应基底的合成甚至可能掩盖较强目标的主瓣,造成邻近目标不能分辨。
至今尚没有统一的反映信号分辨特性的参数。通常用距离模糊函数和速度模糊函数主瓣3dB宽度(半功率宽度)来定义信号的固有分辨率,分别称为名义距离分辨率 τ n r \tau _nr τnr(简称距离分辨率)和名义速度分辨率 f n r f_{nr} fnr(简称速度分辨率)。名义分辨率(nominal resolution)只表示主瓣内邻近目标的分辨能力,而没有考虑旁瓣干扰对目标分辨的影响。有时为了方便,如遇到sinc函数,也采用4dB宽度来表示名义分辨率。
时延分辨率为
Δ τ = ∫ − ∞ ∞ ∣ χ ( τ , 0 ) ∣ 2 ∣ χ ( 0 , 0 ) ∣ 2 \Delta \tau = \frac{\int_{-\infty}^{\infty}|\chi (\tau,0)|^2}{|\chi (0,0)|^2} Δτ=∣χ(0,0)∣2∫−∞∞∣χ(τ,0)∣2
根据Parseval定理,上式可重写为
Δ τ = 2 π ∫ − ∞ ∞ ∣ U ( ω ) ∣ 4 d ω [ ∫ − ∞ ∞ ∣ U ( ω ) ∣ 2 d ω ] 2 = 1 B \Delta \tau= 2\pi \frac{\int_{-\infty}^{\infty}|U(\omega)|^4d\omega}{[\int_{-\infty}^{\infty}|U(\omega)|^2d\omega]^2}=\frac{1}{B} Δτ=2π[∫−∞∞∣U(ω)∣2dω]2∫−∞∞∣U(ω)∣4dω=B1
B B B为信号的有效带宽。因此,是时延分辨率对应的距离分辨率(Range Resolution)为
Δ R = c Δ τ 2 = c 2 B \Delta R = \frac{c\Delta \tau}{2}=\frac{c}{2B} ΔR=2cΔτ=2Bc
其中 c c c为光速, B B B为信号带宽。 Δ R \Delta R ΔR取决于信号带宽。显然,信号带宽越宽,脉冲宽度越窄,距离分辨率越高。
当目标时延差较大时,为了全面考虑主瓣和旁瓣的分辨问题,可以定义另一种反映分频特性的参数:时延分辨常数TRC(Time Resolution Constant),其表达式为
T R C = ∫ − ∞ ∞ ∣ χ ( τ , 0 ) ∣ 2 d τ ∣ χ ( 0 , 0 ) ∣ 2 = ∫ − ∞ ∞ ∣ U ( f ) ∣ 4 d f ( ∫ − ∞ ∞ ∣ U ( f ) ∣ 2 d f ) 2 TRC=\frac{\int_{-\infty}^{\infty}|\chi (\tau,0)|^2d\tau}{|\chi (0,0)|^2}=\frac{\int_{-\infty}^{\infty}|U(f)|^4df}{(\int_{-\infty}^{\infty}|U(f)|^2df)^2} TRC=∣χ(0,0)∣2∫−∞∞∣χ(τ,0)∣2dτ=(∫−∞∞∣U(f)∣2df)2∫−∞∞∣U(f)∣4df
它可作为统一度量多值性和分辨率的参数
显然,从距离分辨角度出发,信号距离模糊函数的最佳形似是冲激函数。因此可用模糊函数与冲激函数的相似程度来衡量信号的固有分辨率,它表示信号频谱与均匀谱的相似程度,称为频谱持续宽度FSP(Frequency SPan),有的文献也称为有效相关带宽,其定义式为
F S P = ( ∫ − ∞ ∞ ∣ U ( f ) ∣ 2 d f ) 2 ∫ − ∞ ∞ ∣ U ( f ) ∣ 4 d f = 1 T R C FSP = \frac{(\int_{-\infty}^{\infty}|U(f)|^2df)^2}{\int_{-\infty}^{\infty}|U(f)|^4df}=\frac{1}{TRC} FSP=∫−∞∞∣U(f)∣4df(∫−∞∞∣U(f)∣2df)2=TRC1
因此,表示距离分辨率的距离分辨常数 C R C_R CR就可以表示为
C R = c ∙ T R C 2 = c 2 ∙ F S P C_R=\frac{c \bullet TRC}{2}=\frac{c }{2\bullet FSP} CR=2c∙TRC=2∙FSPc
不难看出,时延分辨常数TRC越小,或频谱持续宽度FSP越宽,则距离分辨率越好。因此,只要信号具有大的持续带宽(有效相关带宽)就能获得高的距离分辨率,而不必具有很窄的脉冲宽度(窄脉冲信号限制辐射的能量)
速度分辨率
与距离分辨率类似,信号的是速度分辨率取决于速度模糊函数
∣ χ ( 0 , f d ) ∣ = ∫ − ∞ ∞ ∣ u ( t ) ∣ 2 e j 2 π f d t d t |\chi (0,f_d)|=\int_{-\infty}^{\infty}|u(t)|^2e^{j2\pi f_dt}dt ∣χ(0,fd)∣=∫−∞∞∣u(t)∣2ej2πfdtdt
多普勒分辨率 Δ f d \Delta f_d Δfd为
Δ f d = ∫ − ∞ ∞ ∣ χ ( 0 , f d ) ∣ 2 d f ∣ χ ( 0 , 0 ) ∣ 2 = ∫ − ∞ ∞ ∣ u ( t ) ∣ 4 d f ∣ ∫ − ∞ ∞ ∣ u ( t ) ∣ 2 d f ∣ 2 = 1 τ ’ \Delta f_d = \frac{\int_{-\infty}^{\infty}|\chi (0,f_d)|^2df}{|\chi (0,0)|^2}= \frac{\int_{-\infty}^{\infty}|u(t)|^4df}{|\int_{-\infty}^{\infty}|u(t)|^2df|^2}=\frac{1}{\tau ’} Δfd=∣χ(0,0)∣2∫−∞∞∣χ(0,fd)∣2df=∣∫−∞∞∣u(t)∣2df∣2∫−∞∞∣u(t)∣4df=τ’1
式中, τ ’ \tau ’ τ’是脉冲宽度。则相应的速度分辨率 Δ v \Delta v Δv为
Δ v = c Δ f d 2 f 0 = c 2 f 0 τ ′ = λ 2 τ ’ \Delta v= \frac{c\Delta f_d}{2f_0}=\frac{c}{2f_0 \tau'}=\frac{\lambda}{2\tau ’} Δv=2f0cΔfd=2f0τ′c=2τ’λ
当目标时延差较大时,为了全面考虑主瓣和旁瓣的分辨问题,可分别定义频率分辨率常数FRC(Frequency Resolution Constant)和时间持续宽度TSP(Time SPan)为
T R C = ∫ − ∞ ∞ ∣ χ ( 0 , f d ) ∣ 2 d τ ∣ χ ( 0 , 0 ) ∣ 2 = ∫ − ∞ ∞ ∣ u ( t ) ∣ 4 d f ( ∫ − ∞ ∞ ∣ u ( t ) ∣ 2 d f ) 2 TRC=\frac{\int_{-\infty}^{\infty}|\chi (0,f_d)|^2d\tau}{|\chi (0,0)|^2}=\frac{\int_{-\infty}^{\infty}|u(t)|^4df}{(\int_{-\infty}^{\infty}|u(t)|^2df)^2} TRC=∣χ(0,0)∣2∫−∞∞∣χ(0,fd)∣2dτ=(∫−∞∞∣u(t)∣2df)2∫−∞∞∣u(t)∣4df
F S P = ( ∫ − ∞ ∞ ∣ u ( t ) ∣ 2 d f ) 2 ∫ − ∞ ∞ ∣ u ( t ) ∣ 4 d t = 1 F R C FSP = \frac{(\int_{-\infty}^{\infty}|u(t)|^2df)^2}{\int_{-\infty}^{\infty}|u(t)|^4dt}=\frac{1}{FRC} FSP=∫−∞∞∣u(t)∣4dt(∫−∞∞∣u(t)∣2df)2=FRC1
由上式可得到表示速度分辨率的速度分辨常数
C v = c ∙ F R C 2 f 0 = λ 2 ∙ T S P C_v=\frac{c \bullet FRC}{2f_0}=\frac{\lambda}{2\bullet TSP} Cv=2f0c∙FRC=2∙TSPλ
式中 c c c为光速, f 0 f_0 f0为载频, λ \lambda λ为波长。所以,频率分辨常数FRC越小,或时间持续宽度TSP(也称为有效相关时间)越宽,信号的速度分辨率越好。
距离-速度联合分辨率
速度相同、距离不同的目标分辨用信号的距离模糊函数来表示,距离相同、速度不同的目标分辨用信号的速度模糊函数表示。类似地,可以用 χ ( τ , f d ) χ ( 0 , 0 ) \frac{\chi (\tau,f_d)}{\chi (0,0)} χ(0,0)χ(τ,fd)来表示距离-速度联合分辨率。
定义模糊面积AA(Area of Ambiguity)
A A = ∫ − ∞ ∞ ∫ − ∞ ∞ ∣ χ ( τ , f d ) ∣ 2 d τ d f d ∣ χ ( 0 , 0 ) ∣ 2 AA=\frac{\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}|\chi (\tau,f_d)|^2d\tau df_d}{|\chi (0,0)|^2} AA=∣χ(0,0)∣2∫−∞∞∫−∞∞∣χ(τ,fd)∣2dτdfd
作为距离-速度(或时延-多普勒)联合分辨常数。
由模糊函数性质3可知,只要信号的能量一定,模糊面积即为定值。这就说明了时延与多普勒联合分辨率的限制。无论怎样使时延 τ \tau τ或多普勒 f d f_d fd分辨率的某一方减小,其结果都将带来另一方的增大。这就是雷达模糊原理(Radar Ambiguity Principle)。设计雷达信号时,只能在模糊原理的约束下通过改变模糊曲面的形状,使之与特定的目标环境相匹配。
仿真
矩形脉冲信号的模糊函数
矩形脉冲信号的归一化包括可写为
u ( t ) = { 1 T , − T 2 < t < T 2 0 , 其他 u(t) = \begin{cases} \frac{1}{\sqrt T}, & {-\frac{T}{2}< t < \frac{T}{2}} \\ 0, & \text{其他} \end{cases} u(t)={T1,0,−2T<t<2T其他
其中, T T T为脉冲宽度
所以,矩形脉冲信号的模糊函数可以表示为
∣ χ ( τ , f d ) ∣ = { ∣ s i n π f d ( T − ∣ τ ∣ ) π f d ( T − ∣ τ ∣ ) ( 1 − ∣ τ ∣ T ) ∣ , ∣ τ ∣ < T 0 , ∣ τ ∣ > T |\chi(\tau,f_d)| = \begin{cases} |\frac{sin\pi f_d(T-|\tau|)}{\pi f_d(T-|\tau|)}(1-\frac{|\tau|}{T})|, & {|\tau| < T} \\ 0, & {|\tau|>T} \end{cases} ∣χ(τ,fd)∣={∣πfd(T−∣τ∣)sinπfd(T−∣τ∣)(1−T∣τ∣)∣,0,∣τ∣<T∣τ∣>T
若令 f d = 0 f_d=0 fd=0,可得到信号的距离模糊函数,即信号的自相关函数
∣ χ ( τ , 0 ) ∣ = { ( 1 − ∣ τ ∣ T ) , ∣ τ ∣ < T 0 , 其 他 |\chi(\tau,0)| = \begin{cases} (1-\frac{|\tau|}{T}), & {|\tau| < T} \\ 0, & {其他} \end{cases} ∣χ(τ,0)∣={(1−T∣τ∣),0,∣τ∣<T其他
同样,若令 τ = 0 \tau = 0 τ=0,则可得到信号的速度(多普勒)模糊函数
∣ χ ( 0 , f d ) ∣ = ∣ s i n π f d T π f d T ∣ |\chi(0,f_d)|=|\frac{sin\pi f_d T}{\pi f_d T}| ∣χ(0,fd)∣=∣πfdTsinπfdT∣
仿真实验:
代码:
% 矩形脉冲的模糊函数
T = 1e-6; %脉冲宽度
grid = 64; %点数
t = -T : T/grid : T - T/grid; %时间轴
F = 10e6; %频率
f = -F : F/grid : F - F/grid; %频率轴
[tau,fd] = meshgrid(t,f);
AF_pulse = abs(sin(pi*fd.*(T-abs(tau))+eps) ./ (pi*fd.*(T-abs(tau))+eps) .* (1-abs(tau)/T));
subplot(2,2,1);surfl(tau*1e6,fd*1e-6,AF_pulse);xlabel('\tau/\mu s');ylabel('f_{d}/MHz');zlabel('|\chi(\tau ,f_{d})|');title('矩形脉冲信号模糊函数');
subplot(2,2,2);contour(tau*1e6,fd*1e-6,AF_pulse,'b');xlabel('\tau/\mu s');ylabel('f_{d}/MHz');title('矩形脉冲信号模糊度图');
dis = (1-abs(tau)/T);
subplot(2,2,3);plot(t*1e6,dis(1,:));xlabel('\tau/\mu s');ylabel('|\chi(\tau ,0)|');title('距离模糊函数');
vel = abs(sin(pi * fd * T) ./ (pi * fd * T));
subplot(2,2,4);plot(fd*1e-6,vel(:,grid+1));xlabel('\tau/\mu s');ylabel('|\chi(\tau ,0)|');title('距离模糊函数');
运行结果:

线性调频信号的模糊函数
线性调频矩形脉冲信号的表达式可写为:
s ( t ) = u ( t ) e j 2 π f 0 t = 1 T r e c t ( t T ) e j ( 2 π f 0 t + π u t 2 ) s(t)=u(t)e^{j2\pi f_0t}=\frac{1}{\sqrt T}rect(\frac{t}{T})e^{j(2\pi f_0t+\pi u t^2)} s(t)=u(t)ej2πf0t=T1rect(Tt)ej(2πf0t+πut2)
信号的复包络为
u ( t ) = 1 T r e c t ( t T ) e j π u t 2 u(t)=\frac{1}{\sqrt T}rect(\frac{t}{T})e^{j\pi u t^2} u(t)=T1rect(Tt)ejπut2
r e c t ( t T ) = { 1 , t ≤ T 2 0 , t > T 2 rect(\frac{t}{T}) = \begin{cases} 1, & {t \le \frac{T}{2}} \\ 0, & {t > \frac{T}{2}} \end{cases} rect(Tt)={1,0,t≤2Tt>2T
T T T为脉冲宽度, u = B / T u=B/T u=B/T为调频斜率, B B B为调频带宽,也称频偏。
信号的瞬时频率为
f i ( t ) = 1 2 π d d t [ 2 π f 0 t + π u t 2 ] = f 0 + u t f_i(t)=\frac{1}{2\pi}\frac{d}{dt}[2\pi f_0 t+\pi u t^2]=f_0+ut fi(t)=2π1dtd[2πf0t+πut2]=f0+ut
信号波形示意图如下图所示:

线性调频信号的模糊函数
将信号的复包络代入到模糊函数的定义式后可得:
χ ( τ , f d ) = 1 T ∫ − ∞ ∞ r e c t ( t T ) e j π u t 2 r e c t ( t + τ T ) e − j π u ( t + τ ) 2 e j 2 π f d t d t = e − j π u τ 2 1 T ∫ − ∞ ∞ r e c t ( t T ) r e c t ( t + τ T ) e j 2 π ( f d − u τ ) t d t \chi (\tau,f_d)=\frac{1}{T}\int_{-\infty}^{\infty}rect(\frac{t}{T})e^{j\pi u t^2}rect(\frac{t+\tau}{T})e^{-j\pi u(t+\tau)^2}e^{j2\pi f_d t}dt=e^{-j\pi u \tau ^2}\frac{1}{T}\int_{-\infty}^{\infty}rect(\frac{t}{T})rect(\frac{t+\tau}{T})e^{j2\pi (f_d-u\tau)t}dt χ(τ,fd)=T1∫−∞∞rect(Tt)ejπut2rect(Tt+τ)e−jπu(t+τ)2ej2πfdtdt=e−jπuτ2T1∫−∞∞rect(Tt)rect(Tt+τ)ej2π(fd−uτ)tdt
上式中积分项为单载频矩形脉冲的模糊函数,只是这里的频移项有一个偏移,即 ( f d − u τ ) (f_d-u\tau) (fd−uτ)。线性调频信号的模糊函数可表示为
∣ χ ( τ , f d ) ∣ = { ∣ ( 1 − ∣ τ ∣ T ) s i n [ π ( f d − u τ ) ( T − ∣ τ ∣ ) ] π ( f d − u τ ) ( T − ∣ τ ∣ ) ∣ , ∣ τ ∣ < T 0 , ∣ τ ∣ > T |\chi(\tau,f_d)| = \begin{cases} |(1-\frac{|\tau|}{T})\frac{sin[\pi (f_d-u\tau)(T-|\tau|)]}{\pi (f_d-u\tau)(T-|\tau|)}|, & {|\tau| < T} \\ 0, & {|\tau|>T} \end{cases} ∣χ(τ,fd)∣={∣(1−T∣τ∣)π(fd−uτ)(T−∣τ∣)sin[π(fd−uτ)(T−∣τ∣)]∣,0,∣τ∣<T∣τ∣>T
线性调频信号的距离模糊函数或自相关函数为
∣ χ ( τ , 0 ) ∣ = { ∣ ( 1 − ∣ τ ∣ T ) s i n [ π u τ ( T − ∣ τ ∣ ) ] π u τ ( T − ∣ τ ∣ ) ∣ , ∣ τ ∣ < T 0 , 其 它 |\chi(\tau,0)| = \begin{cases} |(1-\frac{|\tau|}{T})\frac{sin[\pi u\tau (T-|\tau|)]}{\pi u\tau(T-|\tau|)}|, & {|\tau| < T} \\ 0, & {其它} \end{cases} ∣χ(τ,0)∣={∣(1−T∣τ∣)πuτ(T−∣τ∣)sin[πuτ(T−∣τ∣)]∣,0,∣τ∣<T其它
不难得到信号的时延分辨率(在-4dB处)为
τ n r = 1 u T = 1 B \tau_{nr}=\frac{1}{uT}=\frac{1}{B} τnr=uT1=B1
当 B T > 30 BT>30 BT>30时,持续带宽FSP近似为调频宽度 B B B,与脉冲宽度无关,只要调频带宽 B B B很大,信号可以有较高的距离分辨率,即
Δ R = c 2 B \Delta R =\frac{c}{2B} ΔR=2Bc
线性调频信号的速度或多普勒模糊函数为:
∣ χ ( 0 , f d ) ∣ = T ∣ s i n π f d T π f d T ∣ |\chi(0,f_d)|=T|\frac{sin\pi f_d T}{\pi f_d T}| ∣χ(0,fd)∣=T∣πfdTsinπfdT∣
因此,线性调频信号的多普勒分辨率(-4dB)为 f n r ≈ 1 / T f_{nr} \approx 1/T fnr≈1/T。持续时宽等于脉冲的宽度 T T T,频移分辨常数 F R C = 1 / T S P = 1 / T FRC=1/TSP=1/T FRC=1/TSP=1/T
仿真实验:
代码:
% 线性调频信号的模糊函数
T = 1e-6; %脉冲宽度
B = 4e6; %带宽
grid = 64;
u = B / T; %调频斜率
t = -T : T/grid : T; %时间序列
f = -B : B/grid : B; %频率序列
[tau,fd]=meshgrid(t,f);
AF_fmcw = abs((1 - abs(tau) / T) .* sin(pi * (fd - u .* tau) .* (T - abs(tau)) + eps) ./ (pi * (fd - u .* tau) .* (T - abs(tau)) + eps));
AF_fmcw = AF_fmcw / max(max(AF_fmcw));
subplot(2,2,1);surfl(tau*1e6,fd*1e-6,AF_fmcw);xlabel('\tau/\mu s');ylabel('f_{d}/MHz');zlabel('|\chi(\tau ,f_{d})|');title('线性调频信号模糊函数');
subplot(2,2,2);contour(tau*1e6,fd*1e-6,AF_fmcw,'b');xlabel('\tau/\mu s');ylabel('f_{d}/MHz');title('线性调频信号模糊度图');
dis = abs((1 - abs(tau) / T) .* sin(pi * u .* tau .* (T - abs(tau)) + eps) ./ (pi * u .* tau .* (T - abs(tau)) + eps));
subplot(2,2,3);plot(t*1e6,dis(1,:));xlabel('\tau/\mu s');ylabel('|\chi(\tau ,0)|');title('距离模糊函数');
vel = T * abs(sin(pi * fd * T) ./ (pi * fd * T));
subplot(2,2,4);plot(fd*1e-6,vel(:,grid+1));xlabel('f_{d}/MHz');ylabel('|\chi(0 ,f_{d})|');title('速度模糊函数');
运行结果:

参考文献:
- 《现代雷达系统分析与设计》,陈伯孝
- https://blog.csdn.net/Shen_KL/article/details/116765790

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 33
33 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)