
Autoware 1.12学习整理--02--构建点云地图
〇、前言构建点云地图可以使用真实的激光雷达对真实环境构建点云地图,也可以使用仿真的激光雷达对仿真环境构建点云地图,后者通常使用Lgsvl与autoware进行联合仿真,Lgsvl是一款专业的自动驾驶仿真软件,但本人对gazebo更熟悉,所以本文使用Ndt_mapping模块构建gazebo环境的点云地图。一、配置gazebo仿真环境1、下载仿真功能包cd your_workspace/src/gi
〇、前言
构建点云地图可以使用真实的激光雷达对真实环境构建点云地图,也可以使用仿真的激光雷达对仿真环境构建点云地图,后者通常使用Lgsvl与autoware进行联合仿真,Lgsvl是一款专业的自动驾驶仿真软件,但本人对gazebo更熟悉,所以本文使用Ndt_mapping模块构建gazebo环境的点云地图。
一、配置gazebo仿真环境
1.1、下载仿真功能包
cd your_workspace/src/
git clone https://github.com/yukkysaito/vehicle_sim.git --recurse-submodules
1.2、编译功能包
cd your_workspace
catkin_make
1.3、测试
roslaunch vehicle_sim_launcher world_test.launch
运行上述指令后,打开了gazebo仿真环境,Rviz界面和rqt_robot_steering插件,如下图所示,可以通过rqt_robot_steering插件控制仿真环境中的汽车移动。

二、构建点云地图
2.1、录制点云数据
autoware默认的激光雷达坐标系是velodyne,话题名称是/points_raw,要确保仿真环境中的与autoware的一致。打开1.3小节的仿真环境,使用以下指令录制点云数据,使用rqt_robot_steering插件控制汽车在仿真环境中走一圈,最后Ctrl+C停止录制。
rosbag recored /points_raw
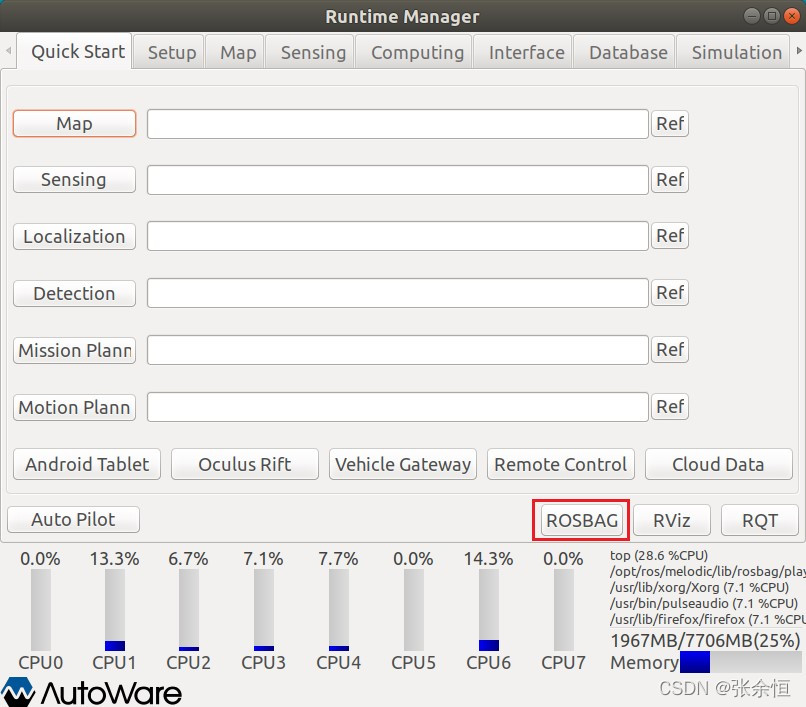
也可以点击autoware界面的ROSBAG按钮,在弹出的对话框中点击下方Refresh 按钮刷新话题列表,找到/points_raw并勾选,点击Start 按钮开始录制数据,汽车走完一圈后点击Stop停止录制。

2.2、查看点云数据
在建图前,可以使用如下指令播放记录的点云数据,将play后面的换成自己的rosbag数据名称。
rosbag play 2022-03-03-22-10-39.bag
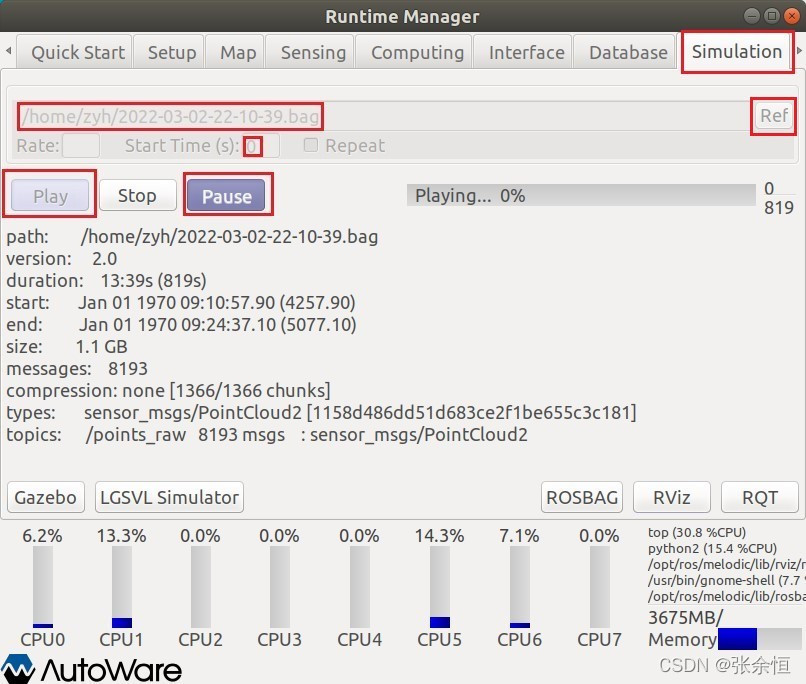
也可以通过autoware界面播放录制的点云数据,点击Simulation页面,点击Ref按钮加载录制的bag文件,将Start Time设置成0,点击Play等到界面出现bag文件信息后,点击Pause按钮停止播放,等打开Rviz后再播放,如下图所示:
打开Rviz,将Fixed Frame由world修改为velodyne,点击左下角Add按钮,加载By Topic下/points_raw话题的 PointCloud2 选项,此时能够看到点云数据:

2.3、建图
建图时需要完成如下图所示的tf树建立,从world到map的坐标系转换与从base_link到velodyne的坐标系转换是固定不变的,用ROS的TF工具即可,map到base_link的坐标系转换由autoware中的ndt_mapping模块完成。

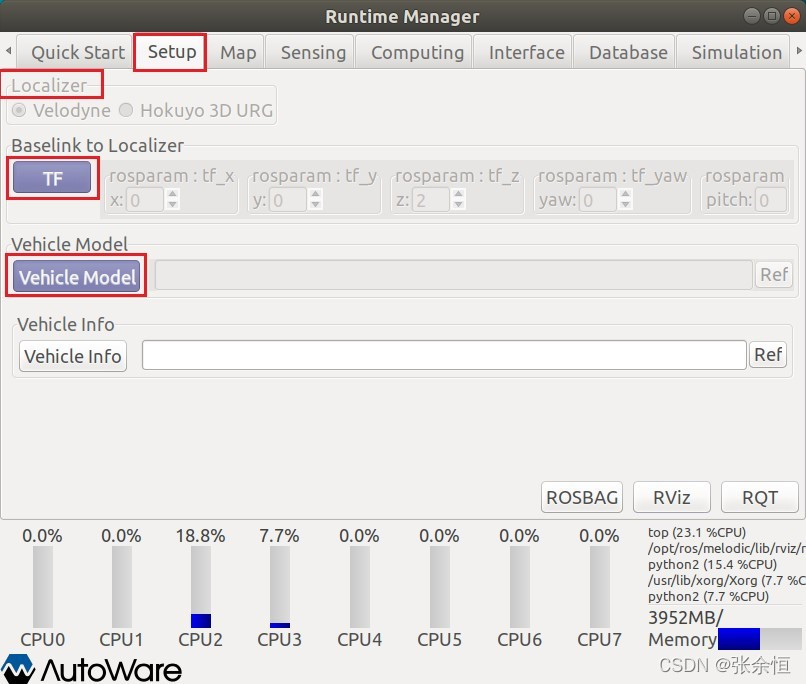
2.3.1、完成从base_link到velodyne的坐标系转换。
切换到autoware的Setup页面下,确定Localizer选的是Velodyne,设置Baselink to Localizer的x、y、z、yaw、pitch、roll数值,其为雷达中心点与车身后轴中心点的相对位置关系,接着点击TF按钮,最后点击Vehicle Model按钮,如果其后为空,那么会加载一个默认模型。
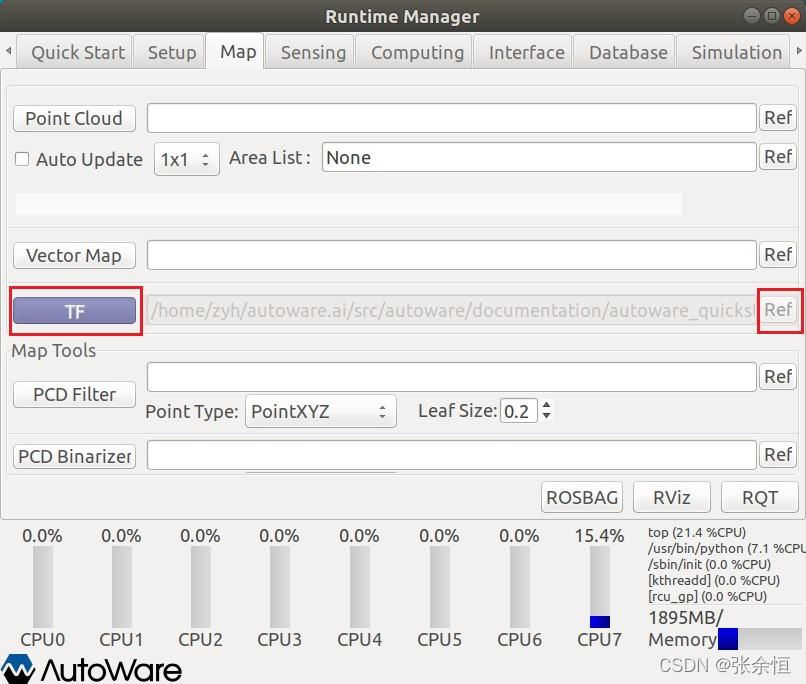
2.3.2、完成从world到map的坐标系转换。
切换到autoware的Map页面下,点击TF右侧的Ref按钮,加载如下路径的launch文件,其中是从/world坐标系转换到/map坐标系的tf变换,最后点击TF按钮。
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/tf_local.launch
2.3.3、完成map到base_link的坐标系转换
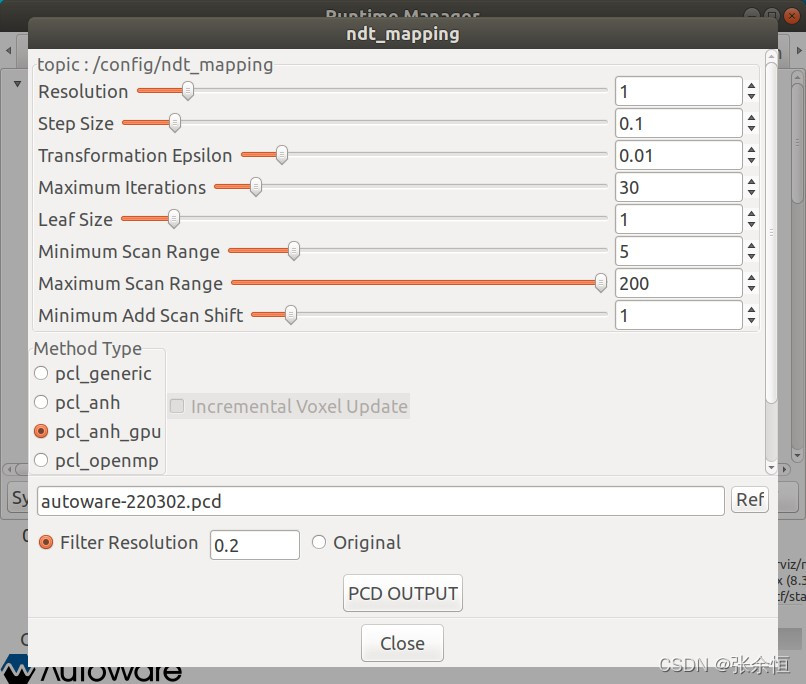
切换到autoware的Computing页面下,点击lidar_localizer下nat_mapping右侧的app按钮,参数用默认的即可,Method Type选择pcl_anh_gpu,即使用GPU进行建图计算,点击Close按钮,最后勾选nat_mapping。

2.3.4、播放数据进行建图
和2.2小节中在autoware界面播放录制的点云数据一样,点击进入Simulaton页面,点击Ref按钮加载之前录制的bag文件,点击Play按钮播放数据,然后再点击Pause暂停播放。点击界面右下方的Rviz按钮,启动Rviz可视化界面,加载Rviz的配置文件ndt_mapping.rviz,但是1.12版本并不存在这个文件,可以在任意位置新建一个ndt_mapping.rviz文件,用gedit打开,输入以下内容并保存:
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
Splitter Ratio: 0.5
Tree Height: 870
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.03
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Class: rviz/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: true
base_link:
Value: true
map:
Value: true
velodyne:
Value: true
world:
Value: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
map:
base_link:
velodyne:
{}
Update Interval: 0
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/PointCloud2
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 254
Min Color: 0; 0; 0
Min Intensity: 0
Name: NDT Map
Position Transformer: XYZ
Queue Size: 1
Selectable: true
Size (Pixels): 1
Size (m): 0.01
Style: Points
Topic: /ndt_map
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: Vehicle Model
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: map
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Angle: 0
Class: rviz/TopDownOrtho
Enable Stereo Rendering:
Stereo Eye Separation: 0.06
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Name: Current View
Near Clip Distance: 0.01
Scale: 10
Target Frame: <Fixed Frame>
Value: TopDownOrtho (rviz)
X: 0
Y: 0
Saved: ~
Window Geometry:
Camera:
collapsed: false
Displays:
collapsed: false
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000016a000003f5fc020000000afb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000041000003f5000000dd00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000000a0049006d00610067006501000003a90000008d0000000000000000fb0000000c00430061006d0065007200610000000420000000160000001600000016000000010000010f000003f5fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fc00000041000003f5000000b000fffffffa000000010100000002fb0000000a0049006d0061006700650000000000ffffffff0000000000000000fb0000000a0056006900650077007301000003a10000010f0000010f00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007510000003efc0100000002fb0000000800540069006d0065010000000000000751000002f600fffffffb0000000800540069006d00650100000000000004500000000000000000000004cc000003f500000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
加载rviz的配置文件后,回到autoware的Simulaton页面,再次点击Pause按钮开始播放,这时可以看到Rviz可视化界面显示如下建图过程:
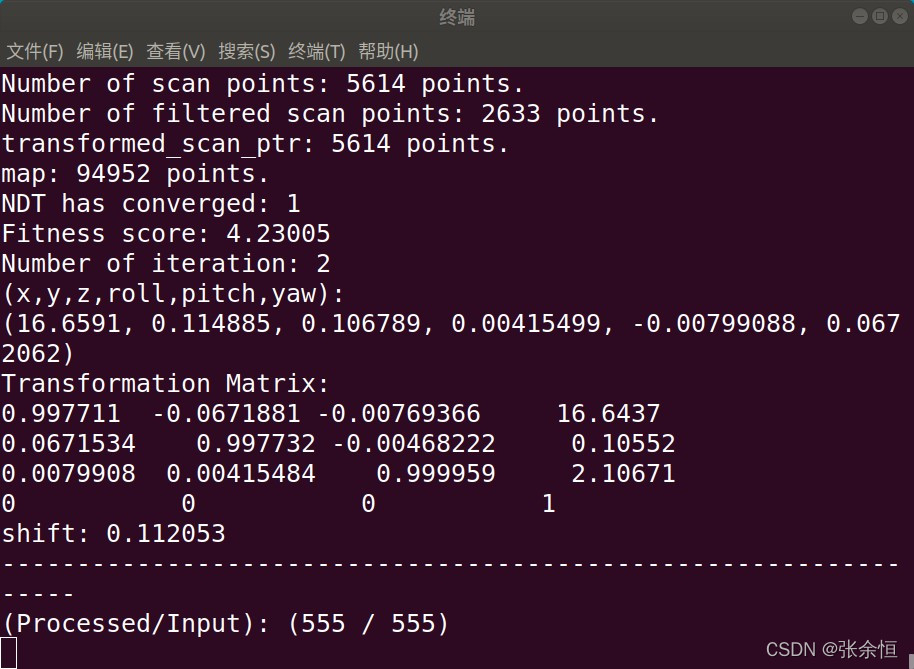
在建图过程中,终端会输出下图所示的信息,其中(Process/Input): (555 / 555),这两个数字前一个数字表示已经处理的点云帧数,后一个表示加载的点云帧数,当两个数字相差过大时,点击Simulaton页面的Pause按钮停止播放数据,等待数据处理,当两个数字重新接近之后,可以再次点击Pause按钮继续运行。
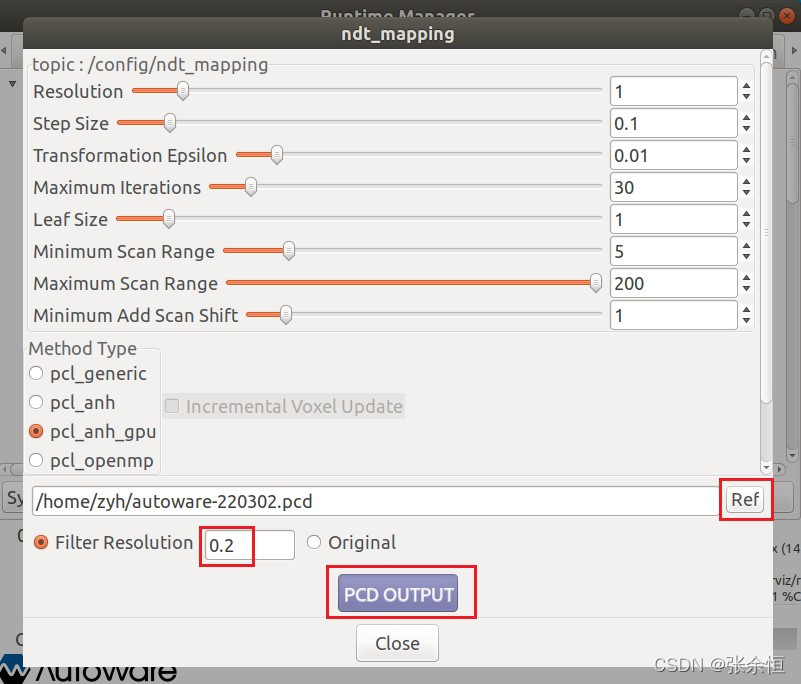
2.3.5、保存地图
当bag数据播放完毕,建图结束后,点击nat_mapping右侧的app按钮,在打开的页面中点击Ref按钮,选择点云地图保存路径,将Filter Resolution设置为0.2,最后点击PCD OUTPUT按钮导出点云地图。
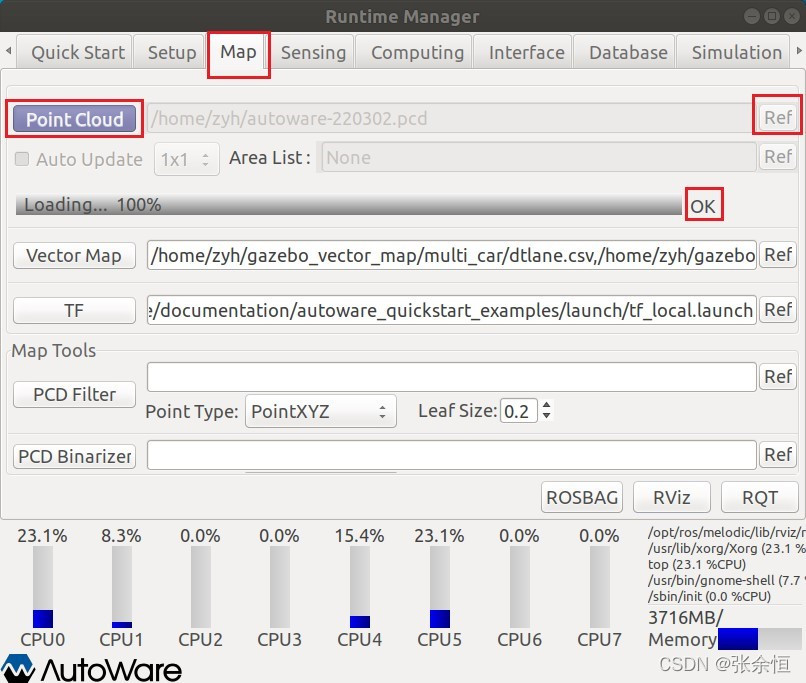
2.4、查看点云地图
打开autoware的Map菜单,点击Point Cloud按钮右侧的Ref按钮,加载刚才保存.pcd文件,并点击Point Cloud按钮,进度条显示OK,则加载完毕,如下所示:
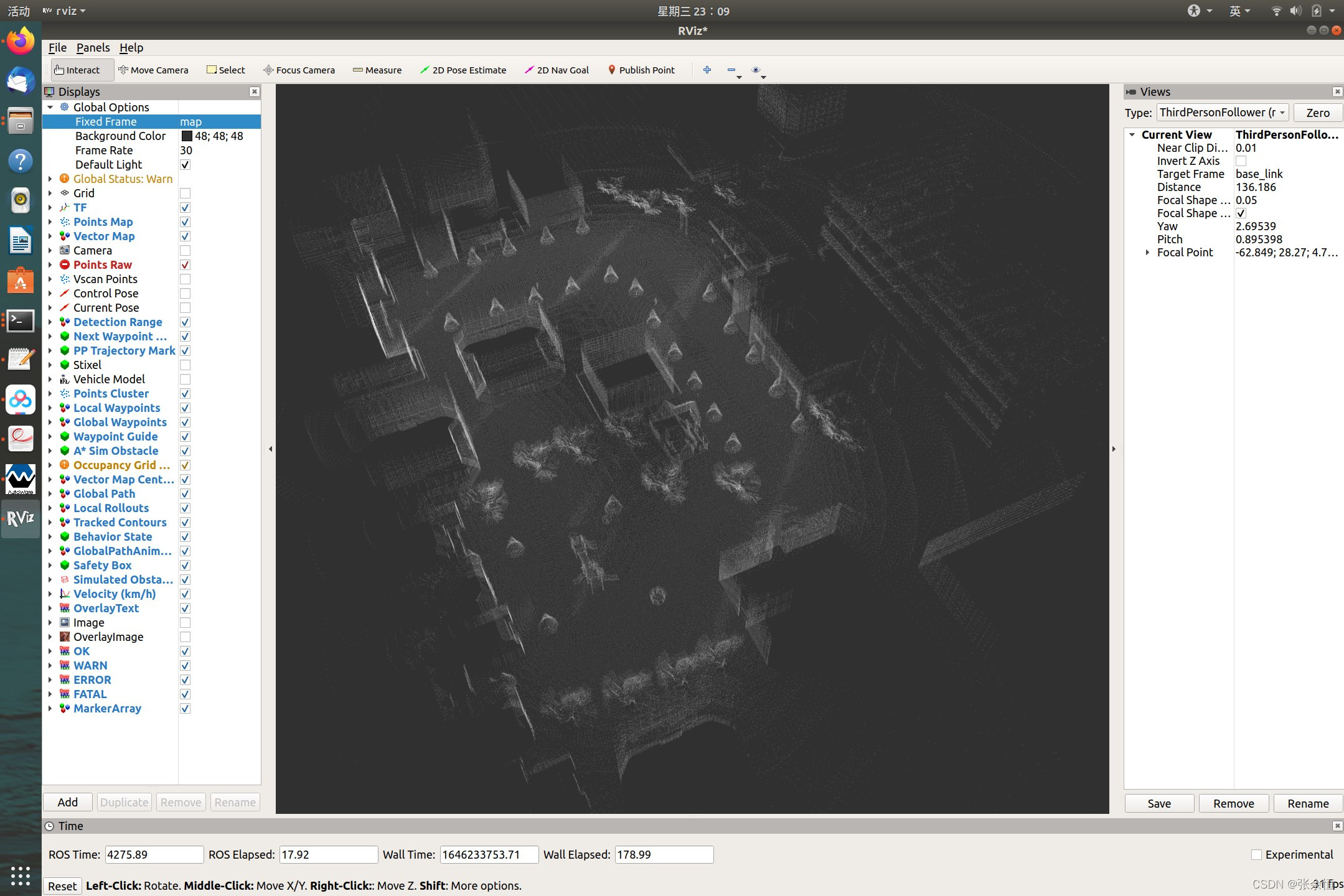
接着打开rviz,在rviz显示界面点击左下角的Add按钮,通过By Topic找到/points_map并打开,将Fixed Frame设置为map,则在rviz中显示如下:
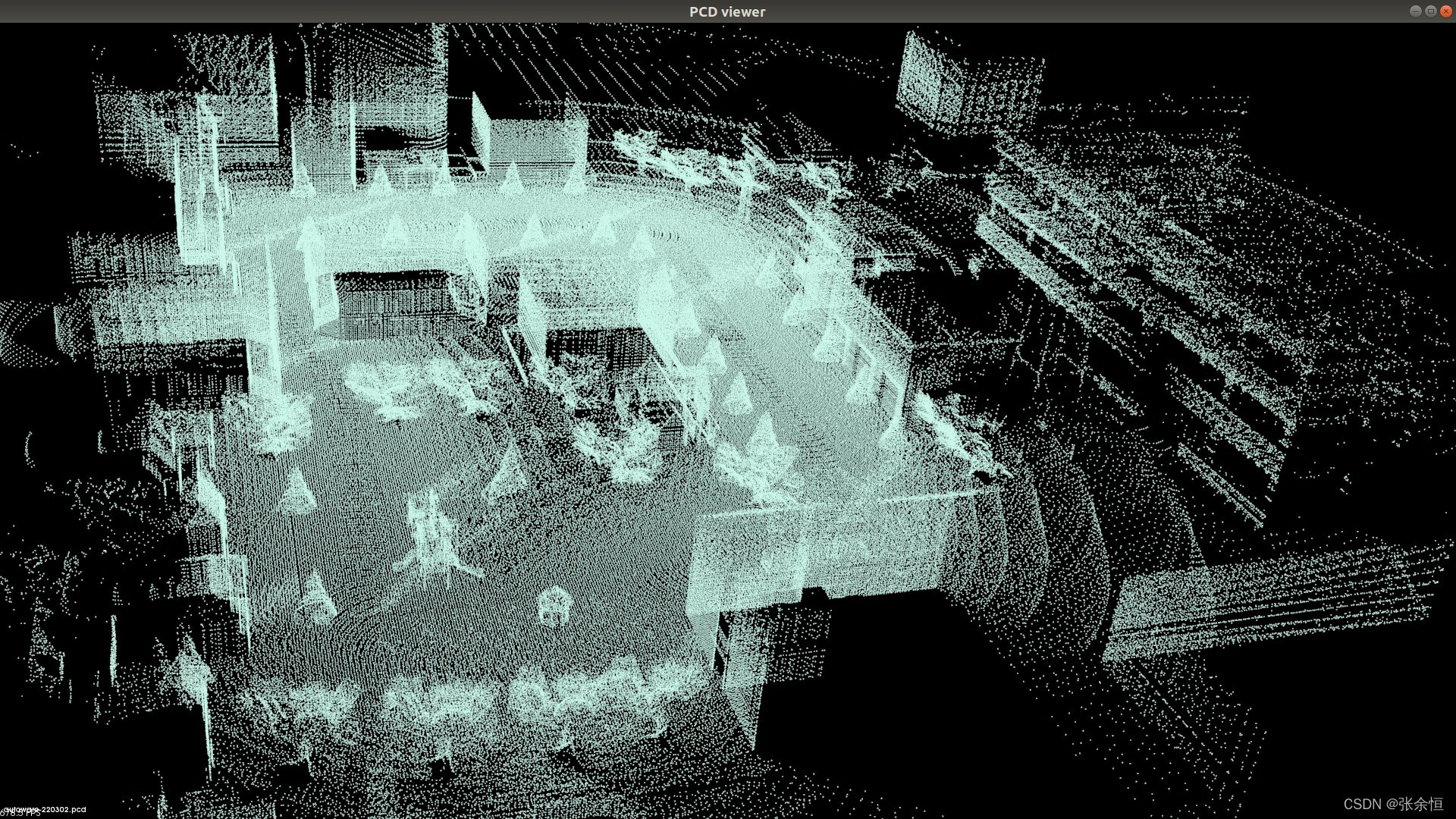
也可以使用pcl_viewer可以查看pcd点云地图,使用如下命令进行安装:
sudo apt-get install libpcl-dev
sudo ln -s /usr/lib/libvtkproj4.so.5.10 /usr/lib/libvtkproj4.so
sudo apt-get install pcl-tools
使用如下命令打开点云地图:
pcl_viewer xxxx.pcd
文章不妥之处还望指正
参考文章:
https://blog.csdn.net/Travis_X/article/details/105418119
https://www.cnblogs.com/hgl0417/p/11130747.html
https://zhuanlan.zhihu.com/p/164432779

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)