
TI毫米波FMCW雷达信号(距离、速度)的处理
前言
本人学习了TI公司的毫米波雷达,板子型号为IWR1443。初次接触雷达的我开始时感到一脸茫然,抛开雷达的各种原理不说,单单是如何使用雷达以及算出基本的距离、速度、角度就让我掉了不少头发。对着TI的相关纯英文数据手册硬啃的时光其实感觉也挺快乐的。奈何用的是漂亮国的板子,TI论坛上的各种英文资料读起来着实头疼,CSDN上也有大量的资料为读者提供学习,写的虽然正确且全面,但对于我来说,理解起来也是较为费劲的,缺少太多的细节。经过一个星期的学习,我来写一下一个初学者的理解供大家参考。
一、FMCW雷达
FMCW,即调频连续波。FMCW雷达发射的信号采用的是频率调制,通过天线向外发射一系列连续调频毫米波,并接收目标的反射信号。其工作原理就是用回波信号和发射信号的一部分进行相干混频,得到包含目标的距离和速度信息的中频信号,对中频信号进行检测即可得到目标的距离和速度。
发射信号
直接上图片大家就能够理解了: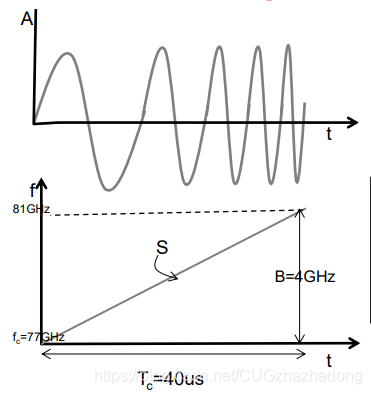
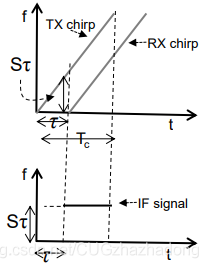
此图片就是我们雷达发射的信号的形式,上面是信号在时域上的波形,下面是信号在频域上的波形。我所使用的波形即为此锯齿波的波形。每一段这样的信号我们把它称为一个chirp(这个词语我们会反复遇到)。
接收信号
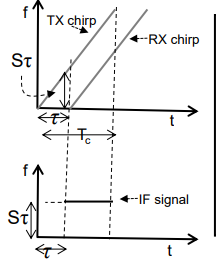
接收信号与发射信号波形是相同的,但存在一个时间差,由于频率随时间变化,因此会产生一个频率差。差频信号便是我们所需要利用的地方。
中频信号
TX表示发射天线,RX表示接收天线,IF signal表示混频(中频信号)。我们信号处理的部分便是处理的中频信号。
根据射频电路知识我们很容易理解中频信号的产生。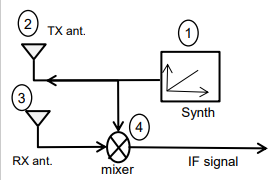
TX信号与RX信号经过一个混频器输出IF signal信号。

相信混频的知识不用再过多的解释了。
二、距离的计算
1.chirp的设置
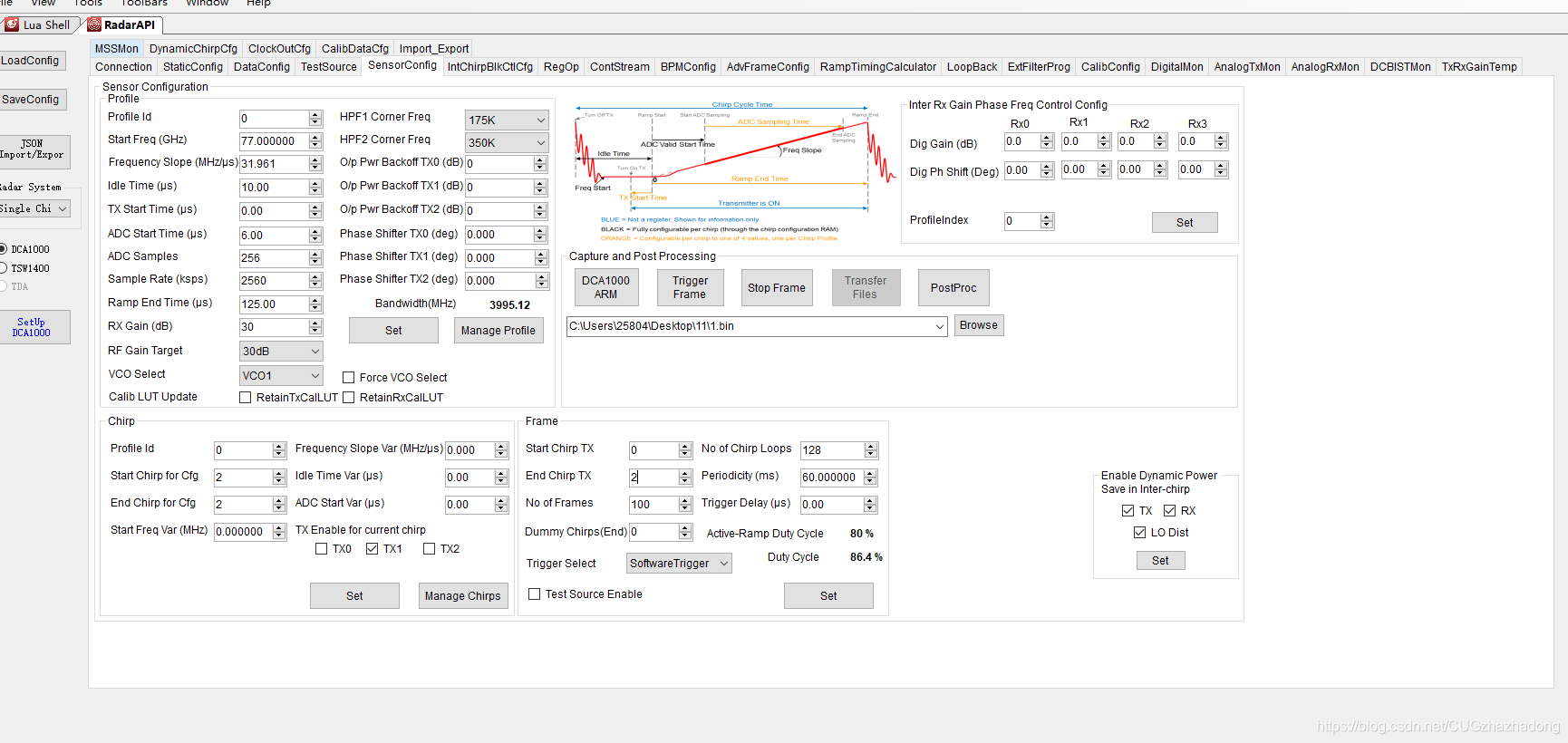
在mmwave studio中chirp的参数设置如上图所示。
总的来说,所设置的参数为
K=31.961e12;%斜率
fs=2.56e6;%采样率
n_samples=256; %采样点数/脉冲
Tc=125e-6;%一个chirp的持续时间
n_chirps=128; %每帧脉冲数
Fram=100; %共100帧
n_RX=4; %RX天线通道数
n_TX=1; %TX发射天线通道数
2.距离的测算
原理推导
还是要摆上这幅图片,接下来看操作。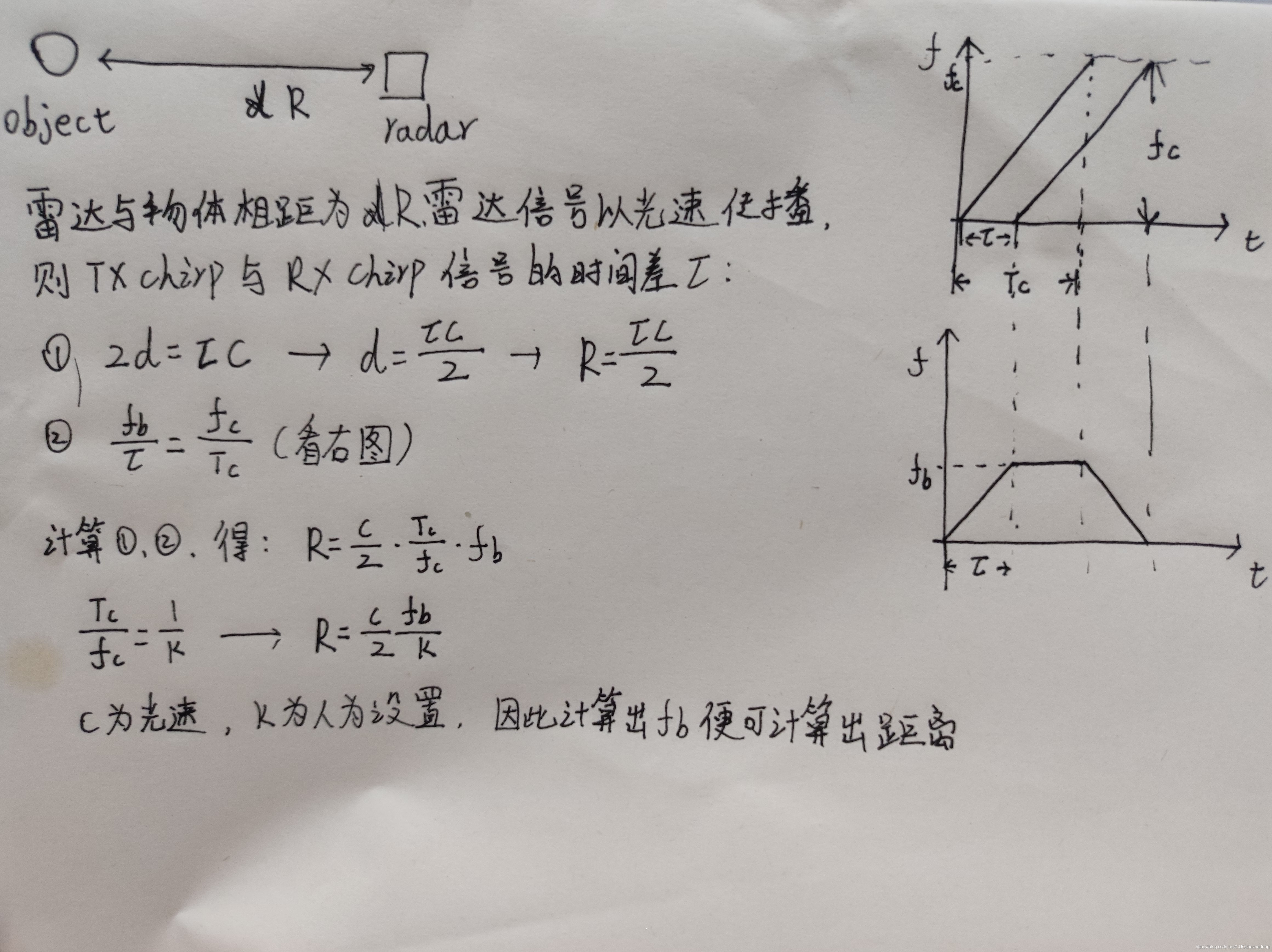
range-FFT
我们需要将信号由时域变换到频域里去处理
相信对于学习过《信号与系统》这门课程的人来说,FFT应该很好理解。
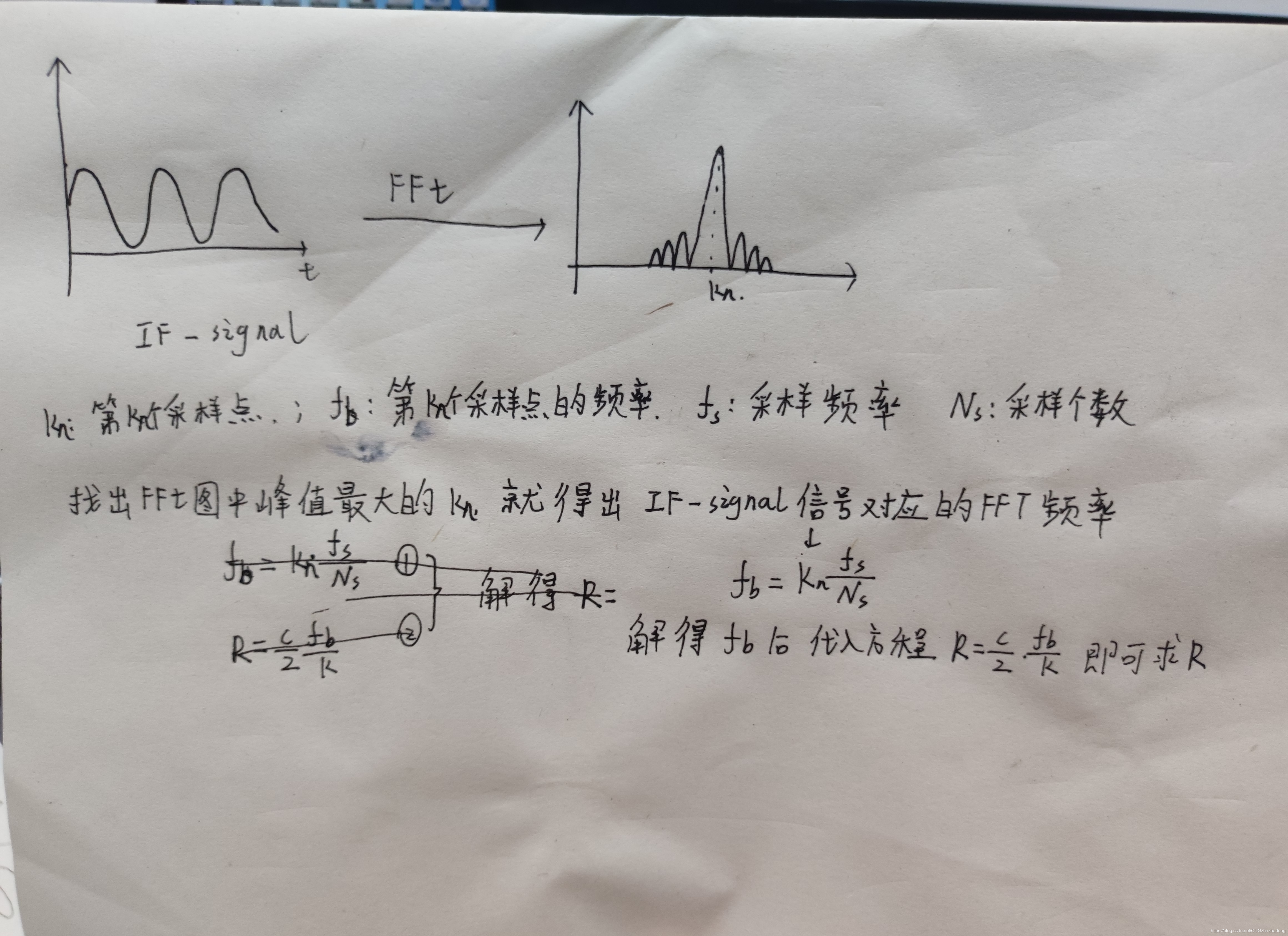
在这里有必要指出的是,数字信号处理第K个采样点的频率Fk与采样频率Fs之间的关系为:
Fk=K*Fs/N
其中N为采样点数。
以下内容在不考虑多普勒频率的基础上,即二者没有相对速度。
IWR1443产生中频信号,DAC1000采集中频信号,将数字化的信号存放在.bin文件中以便后续处理。
首先对.bin文件中的数字信号进行FFT。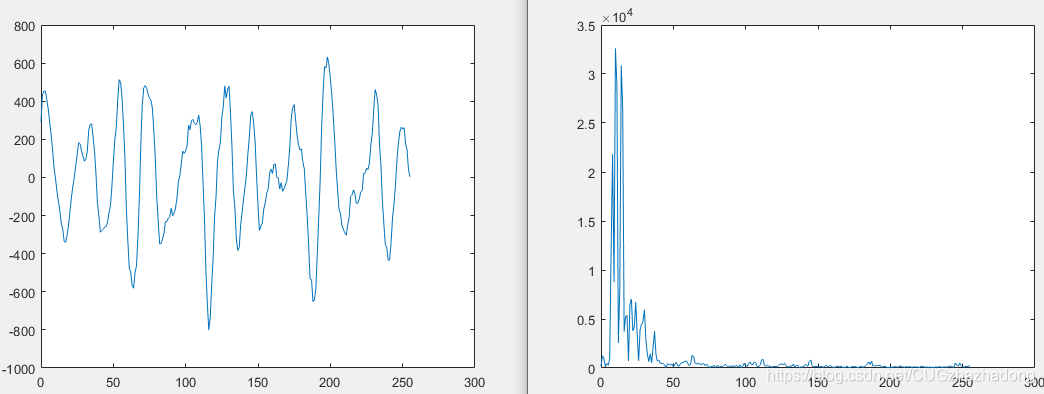 上图是信号经过FFT,完成从时域到频域的变换。
上图是信号经过FFT,完成从时域到频域的变换。
三、速度的计算
原理推导
当被测物体与雷达具有相对速度时,则需要发送多个chirp来完成速度的测算。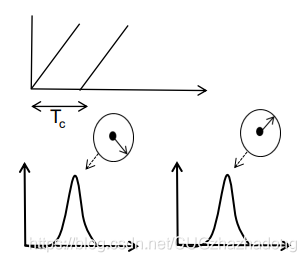
发送多个间隔时间为Tc的chirp,天线将接收到多个chirp回传来的波形。对多个chirp产生的中频信号进行FFT,在Tc时间内,物体速度产生的频差不足以导致频率峰值在range FFT图上发生改变,但峰值处的相位变化很明显(FFT后值为复数)。
TI官方文档给出的说明如下: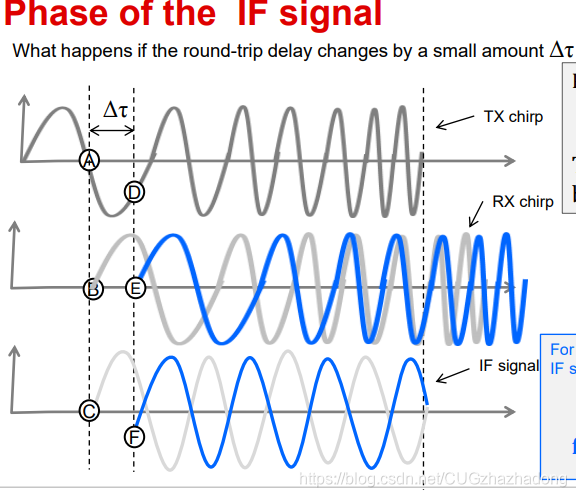
因此对于有相对速度的物体,不同的chirp值进行range FFT之后,峰值的大小与对应的频率不会发生变化,但峰值处的相位会按照速度大小规律变化,即发生旋转。其变化规律如下: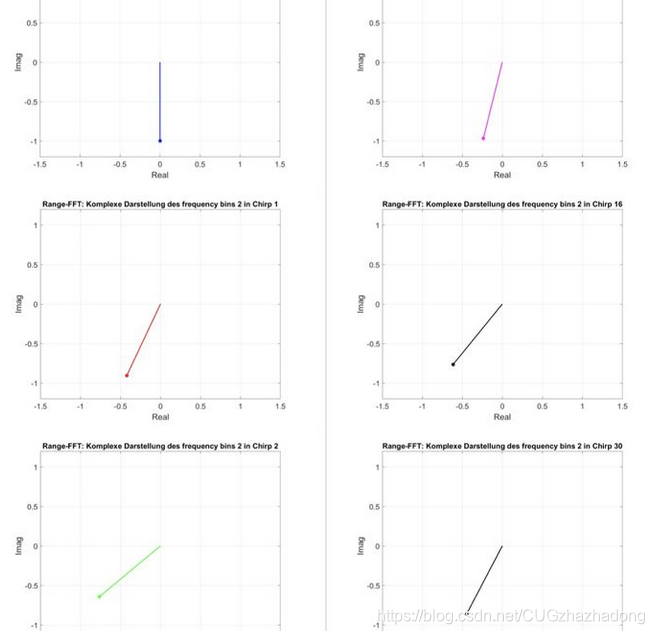
因此每个chirp对应的相位值一直在变化,如下图所示: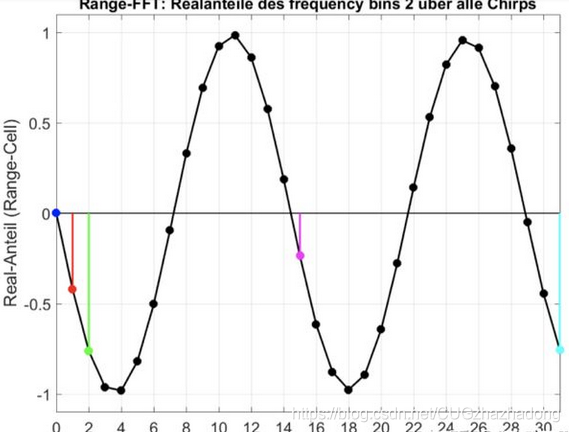 纵坐标表示相位值,横坐标表示不同的chirp。
纵坐标表示相位值,横坐标表示不同的chirp。
因此对所得到的range FFT后的值在chirp维度进行FFT便可得到相位随chirp的变化频率进而计算出速度。
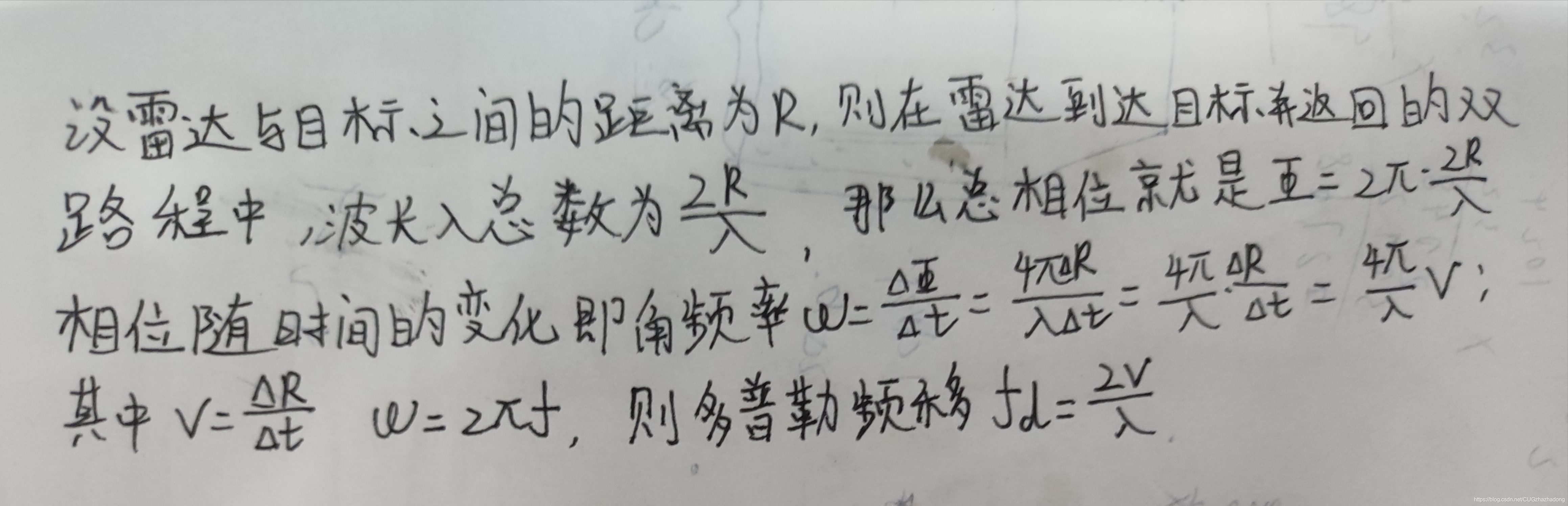
多普勒频率
Speed FFT
对range FFT之后的结果在chirp维度进行FFT。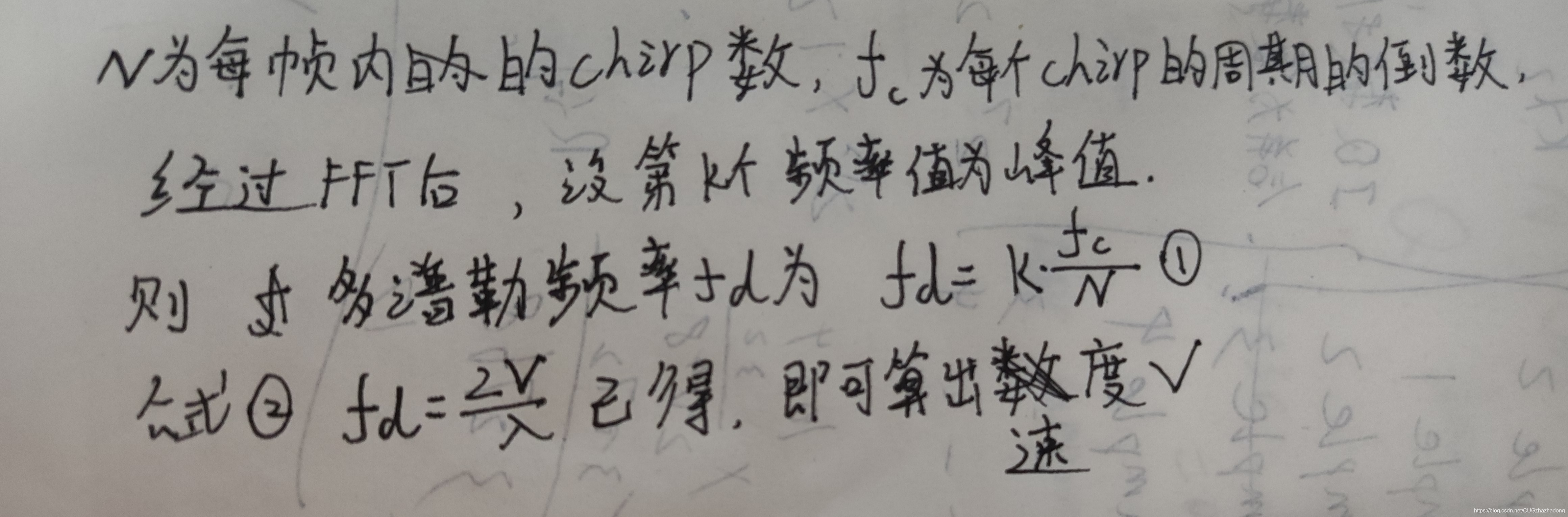 下图是采集的一个人信息进行range FFT结果。
下图是采集的一个人信息进行range FFT结果。
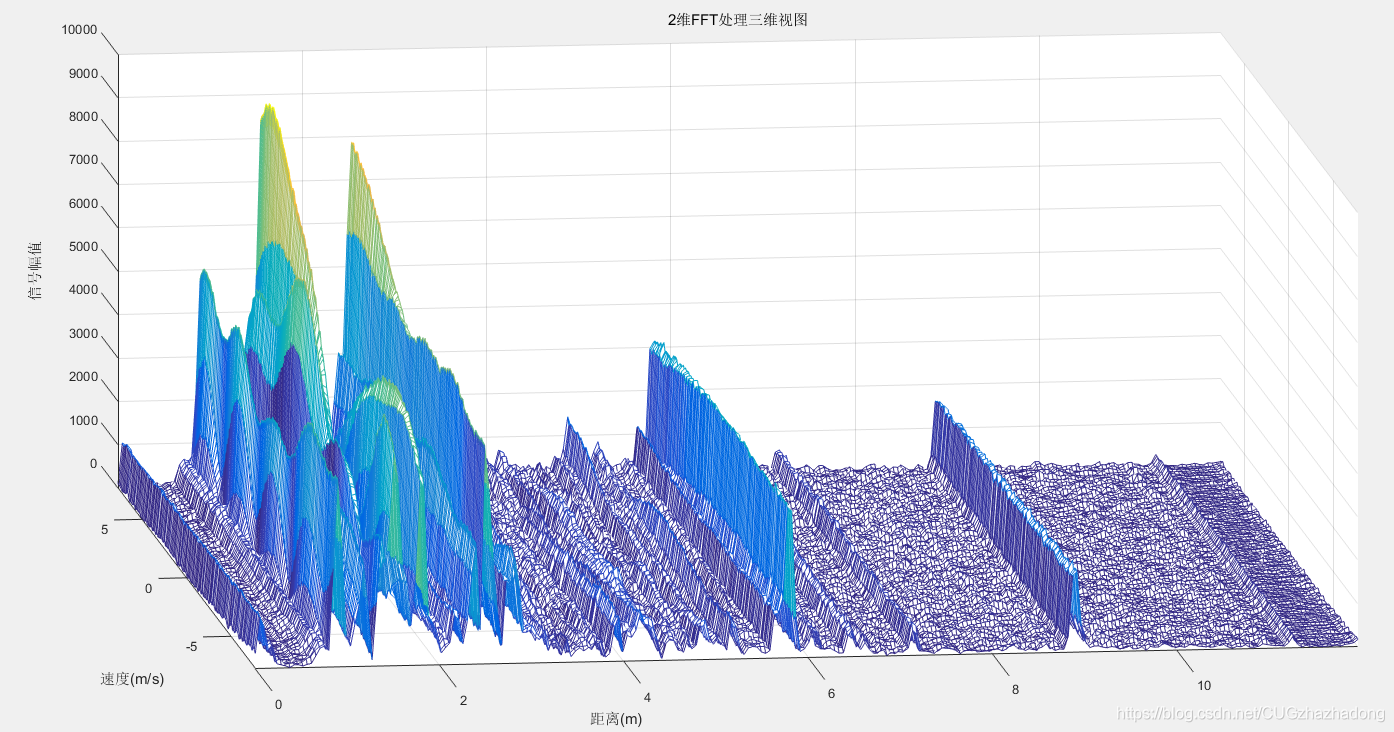 现在在chirp维度做FFT,即在速度维度做FFT。得出结果如下:
现在在chirp维度做FFT,即在速度维度做FFT。得出结果如下: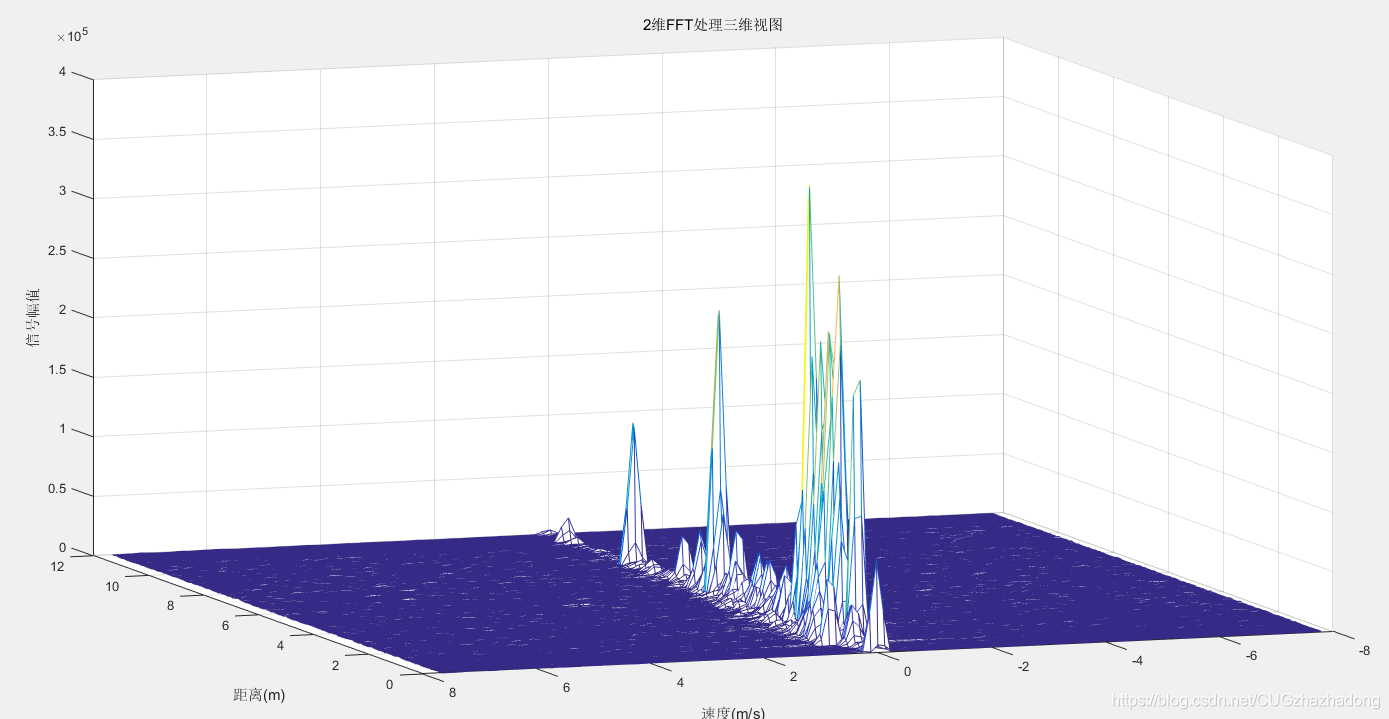 后处理图像结果
后处理图像结果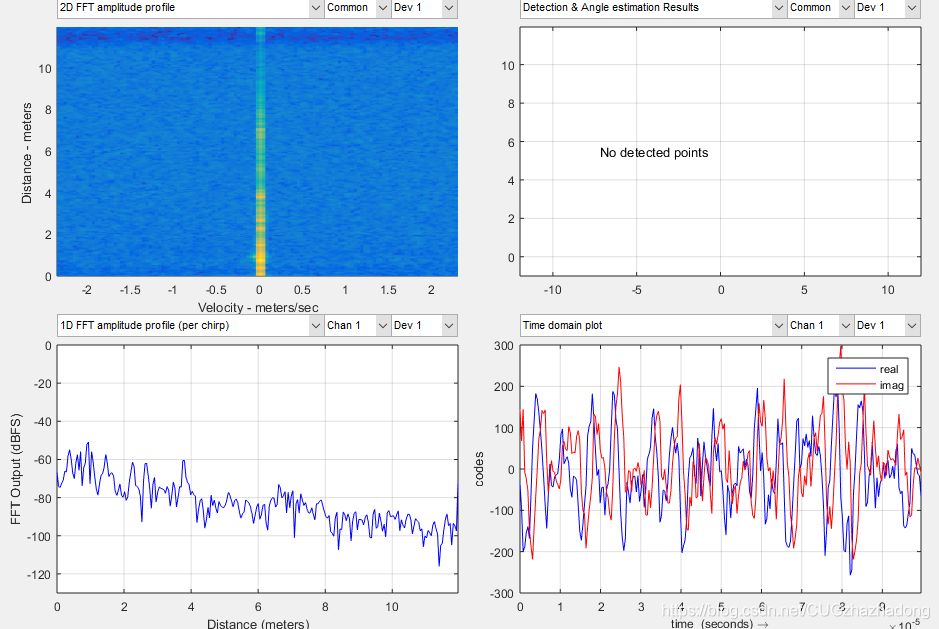
总结
上面展示了距离与速度计算的基本原理,在工程应用中一般采用3DFFT的计算方法进行距离、速度、角度的测算。该方法的原理以及MATLAB实现将在后续博客中加以阐述。
3DFFT模型图: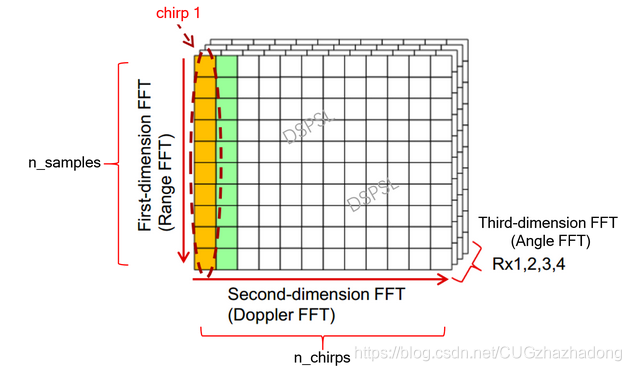
对于毫米波雷达的学习建议学习TI的官方文档:
Introduction to mmwave Sensing FMCW Radars.pdf
DCA1000EVM Data Capture Card User’s Guide.pdf
mmwave Radar Device ADC Raw Data Capture.pdf
mmwave_sensor_raw_data_capture_using_dca1000_v02.pdf
TI官网毫米波雷达信息:
TI官网IWR毫米波雷达信息
推荐学习视频:
TI官方培训视频(英文授课)

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 81
81 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)