Robotics Toolbox工具箱使用
1.Robotics Toolbox工具箱简介Robotics Toolbox工具箱是一个功能强大的机器人工具箱,包含了机器人正、逆向运动学,正、逆向动力学,轨迹规划等,其中可视化仿真使得学习抽象的机器人学变得相对直观、好理解。学习这个工具箱,对理解机器人学很有帮助;然而MATLAB发行版中并没有自带该工具箱,需要自行安装;2.Robotic Box工具箱安装安装方式官网上已给出,可自行参考:ht
1.Robotics Toolbox工具箱简介
Robotics Toolbox工具箱是一个功能强大的机器人工具箱,包含了机器人正、逆向运动学,正、逆向动力学,轨迹规划等,其中可视化仿真使得学习抽象的机器人学变得相对直观、好理解。学习这个工具箱,对理解机器人学很有帮助;然而MATLAB发行版中并没有自带该工具箱,需要自行安装;
2.Robotic Box工具箱安装
安装方式官网上已给出,可自行参考:
https://petercorke.com/toolboxes/robotics-toolbox/
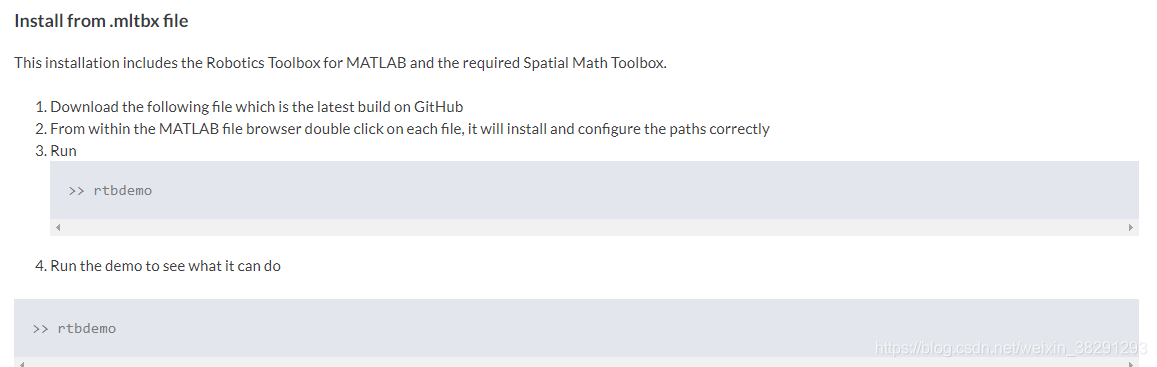
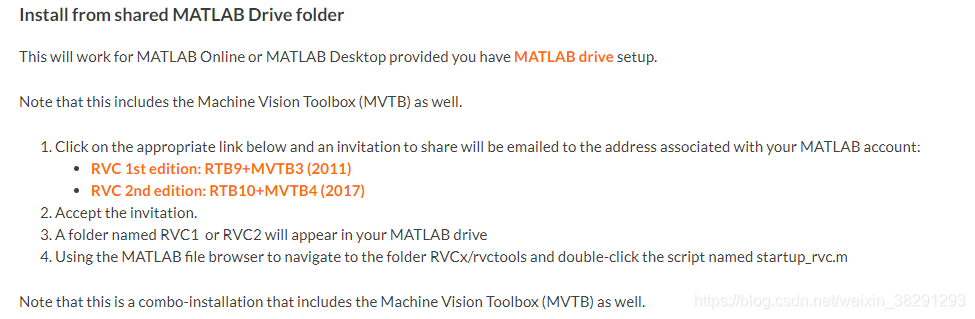
简单来说有两种安装方式,这里使用的压缩包文件进行安装,即上面第一种。
安装步骤:
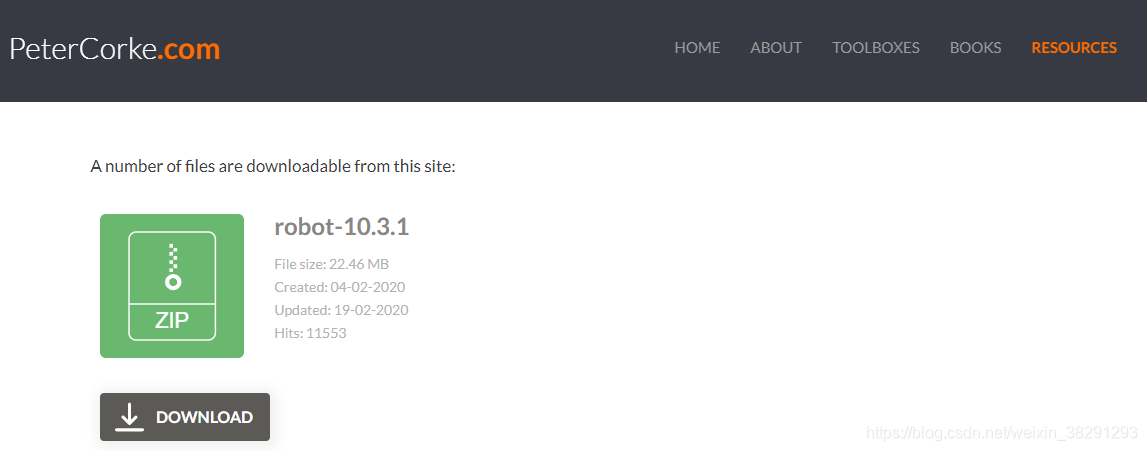
第一步:下载工具箱,这里直接给出一个链接打开后的界面如下,点击“DOWNLOAD”进行下载,下载速度颇慢,需要耐心等待;
链接:https://petercorke.com/resources/downloads/
第二步:将下载的文件进行解压至matlab安装目录toolbox中,解压文件和目录如下;


第三步:设置路径,打开matlab,单击设置路径,进行添加文件,添加完成后保存;


第四步:安装及验证
a、在命令行窗口输入:startup_rvc 进行安装;

b、在命令行窗口输入ver查看是否安装成功;

3.常用函数介绍
主要介绍Link类和SerialLink类;前者用于初始化机器人的运动参数、动力学参数、刚体惯性矩参数、电机参数和传动参数。后者用于创建机器人,并对动机器人进行正运动学、逆运动学、动力学求解等;
1、Link类
操作函数:
% A 连杆变换矩阵
% RP 关节类型: ‘R’ 或 ‘P’
% friction 摩擦力
% nofriction 摩擦力忽略
% dyn 显示动力学参数
% islimit 测试关节是否超出软限制
% isrevolute 测试是否为旋转关节
% isprismatic 测试是否为移动关节
% display 连杆参数以表格形式显示
% char 转为字符串
运动学参数:
% theta 关节角度
% d 连杆偏移量
% a 连杆长度
% alpha 连杆扭角
% sigma 旋转关节为0,移动关节为1
% mdh 标准的D&H为0,否则为1
% offset 关节变量偏移量
% qlim 关节变量范围[min max]
动力学参数:
% m 连杆质量
% r 连杆相对于坐标系的质心位置3x1
% I 连杆的惯性矩阵(关于连杆重心)3x3
% B 粘性摩擦力(对于电机)1x1或2x1
% Tc 库仑摩擦力1x1或2x1
电机和传动参数:
% G 齿轮传动比
% Jm 电机惯性矩(对于电机)
2、SerialLink类
操作函数:
% plot 以图形形式显示机器人
% teach 驱动机器人
% isspherical 测试机器人是否有球腕关节
% islimit 测试机器人是否抵达关节极限
% fkine 前向运动学求解
% ikine6s 6旋转轴球腕关节机器人的逆向运动学求解
% ikine3 3旋转轴机器人的逆向运动学求解
% ikine 采用迭代方法的逆向运动学求解
% jacob0 在世界坐标系描述的雅克比矩阵
% jacobn 在工具坐标系描述的雅克比矩阵
% maniplty 可操纵性度
% jtraj 关节空间轨迹
% accel 关节加速度
% coriolis 关节柯氏力
% dyn 显示连杆的动力学属性
% fdyn 关节运动
% friction 摩擦力
% gravload 关节重力
% inertia 关节惯性矩阵
% nofriction 设置摩擦力为0
% rne 关节的力/力矩
% payload 在末端坐标系增加负载
% perturb 随机扰动连杆的动力学参数
属性:
% links 连杆向量(1xN)
% gravity 重力的方向[gx gy gz]
% base 机器人基座的位姿(4x4)
% tool 机器人的工具变换矩阵[ T6 to tool tip] (4x4)
% qlim 关节范围[qmin qmax] (Nx2)
% offset 偏置(Nx1)
% name 机器人名字(在图形中显示)
% manuf 注释, 制造商名
% comment 注释, 总评
% plotopt options for plot() method (cell array)
% n 关节数
% config 机器人结构字符串, 例如 ‘RRRRRR’
% mdh 运动学中约定的布尔数 (0=DH, 1=MDH)
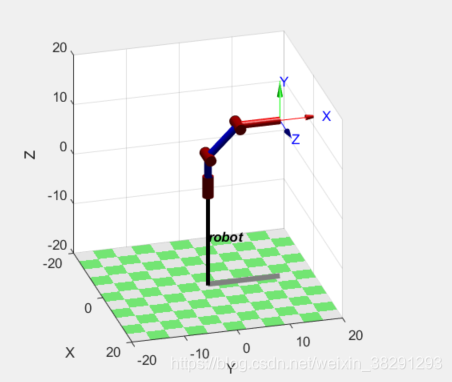
4.简单案例
仿真一个三自由度机械臂,其中z0,z1,z2为旋转关节,根据DH约定建立以下坐标系;

仿真源码见公众号:
下篇预告:
7自由度机械臂实例,工作空间求解,轨迹规划等;

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 14
14 1
1- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)