
【资料分享】STM32配置TB6612驱动程序详解
这个文章是手把手教你使用STM32F103C8T6单片机来配置TB6612FNG电机驱动的驱动程序,也是我自己刚搞清楚,分享出来也是一种总结记录。我们先从硬件上简单认识一下TB6612FNG电机驱动。硬件介绍图片不是重点,就直接从CSDN上其他的博客里搬运过来了。可以很明确的看到左右各八个引脚,总计十六个引脚,可能数量有些多,现在来把他们分类一下。左上角的PWMA、AIN1、AIN2为第一组,PW
这个文章是手把手教你使用STM32F103C8T6单片机来配置TB6612FNG电机驱动的驱动程序,也是我自己刚搞清楚,分享出来也是一种总结记录。
我们先从硬件上简单认识一下TB6612FNG电机驱动。
硬件介绍
图片不是重点,就直接从CSDN上其他的博客里搬运过来了。


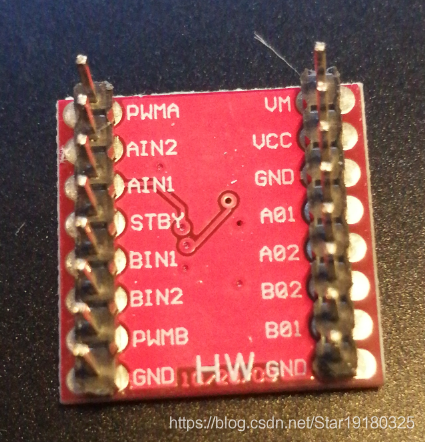
可以很明确的看到左右各八个引脚,总计十六个引脚,可能数量有些多,现在来把他们分类一下。
左上角的PWMA、AIN1、AIN2为第一组,PWMA为A驱动的速度控制引脚,需要输出PWM波。AIN1和AIN2是控制此路驱动的正反装方向的,两个都为低电平则停止,AIN1为高电平AIN2为低电平则正转,反之则反转。所以这里是需要两个高低电平的GPIO输出。
左下角的PWMB、BIN1、BIN2为第二组,和第一组同理。
STBY和GND为第三组
STBY引脚可以理解为此驱动器的总开关,高电平的情况下驱动器才可以正常工作,当STBY为低电平的时候,整个驱动器停止工作。
左下角的GND连接单片机的GNG,由此可以看出,TB6612电机驱动的左边八个引脚全部为连接单片机的信号端。
右边就比较好分了,VM和VCC都接电源正极,两个GND连接电源负极。
A01接A电机的正极,A02连接A电机的负极。
B01连接B电机的正极,B02连接B电机负极。
软件程序部分
从硬件部分可知,我们现在需要两路PWM波和五路的GPIO输出高低电平通道。
PWM波又需要配置STM32定时器。
以下为部分核心代码
这是一个配置了四路定时器的文件,但是目前注释掉了两路,只留了两路。
#include "bsp_GeneralTim_3.h"
static void GENERAL_TIM_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 输出比较通道1 GPIO 初始化
RCC_APB2PeriphClockCmd(GENERAL_TIM_CH1_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_CH1_PORT, &GPIO_InitStructure);
// 输出比较通道2 GPIO 初始化
RCC_APB2PeriphClockCmd(GENERAL_TIM_CH2_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH2_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_CH2_PORT, &GPIO_InitStructure);
// // 输出比较通道3 GPIO 初始化
// RCC_APB2PeriphClockCmd(GENERAL_TIM_CH3_GPIO_CLK, ENABLE);
// GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH3_PIN;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GENERAL_TIM_CH3_PORT, &GPIO_InitStructure);
//
// // 输出比较通道4 GPIO 初始化
// RCC_APB2PeriphClockCmd(GENERAL_TIM_CH4_GPIO_CLK, ENABLE);
// GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH4_PIN;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GENERAL_TIM_CH4_PORT, &GPIO_InitStructure);
}
///*
// * 注意:TIM_TimeBaseInitTypeDef结构体里面有5个成员,TIM6和TIM7的寄存器里面只有
// * TIM_Prescaler和TIM_Period,所以使用TIM6和TIM7的时候只需初始化这两个成员即可,
// * 另外三个成员是通用定时器和高级定时器才有.
// *-----------------------------------------------------------------------------
// *typedef struct
// *{ TIM_Prescaler 都有
// * TIM_CounterMode TIMx,x[6,7]没有,其他都有
// * TIM_Period 都有
// * TIM_ClockDivision TIMx,x[6,7]没有,其他都有
// * TIM_RepetitionCounter TIMx,x[1,8,15,16,17]才有
// *}TIM_TimeBaseInitTypeDef;
// *-----------------------------------------------------------------------------
// */
/* ---------------- PWM信号 周期和占空比的计算--------------- */
// ARR :自动重装载寄存器的值
// CLK_cnt:计数器的时钟,等于 Fck_int / (psc+1) = 72M/(psc+1)
// PWM 信号的周期 T = ARR * (1/CLK_cnt) = ARR*(PSC+1) / 72M
// 占空比P=CCR/(ARR+1)
static void GENERAL_TIM_Mode_Config()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// 开启定时器时钟,即内部时钟CK_INT=72M
GENERAL_TIM_APBxClock_FUN(GENERAL_TIM_CLK,ENABLE);
/*--------------------时基结构体初始化-------------------------*/
// 配置周期,这里配置为100K
// 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_Period=GENERAL_TIM_Period;
// 驱动CNT计数器的时钟 = Fck_int/(psc+1)
TIM_TimeBaseStructure.TIM_Prescaler= GENERAL_TIM_Prescaler;
// 时钟分频因子 ,配置死区时间时需要用到
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
// 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 重复计数器的值,没用到不用管
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
// 初始化定时器
TIM_TimeBaseInit(GENERAL_TIM, &TIM_TimeBaseStructure);
}
void GENERAL_ccr1_Mode_Config(int a)
{
TIM_OCInitTypeDef TIM_OCInitStructure;
// 占空比配置
uint16_t CCR1_Val = a;
// 配置为PWM模式1
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// 输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// 输出通道电平极性配置
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
// 输出比较通道 1
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OC1Init(GENERAL_TIM, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// 使能计数器
TIM_Cmd(GENERAL_TIM, ENABLE);
}
void GENERAL_ccr2_Mode_Config(int a)
{
TIM_OCInitTypeDef TIM_OCInitStructure;
// 占空比配置
uint16_t CCR1_Val = a;
// 配置为PWM模式1
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// 输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// 输出通道电平极性配置
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
// 输出比较通道 2
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OC2Init(GENERAL_TIM, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// 使能计数器
TIM_Cmd(GENERAL_TIM, ENABLE);
}
// void GENERAL_ccr3_Mode_Config(int a)
//{
// TIM_OCInitTypeDef TIM_OCInitStructure;
// // 占空比配置
// uint16_t CCR1_Val = a;
// // 配置为PWM模式1
// TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// // 输出使能
// TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// // 输出通道电平极性配置
// TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
//
// // 输出比较通道 3
// TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
// TIM_OC3Init(GENERAL_TIM, &TIM_OCInitStructure);
// TIM_OC3PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// // 使能计数器
// TIM_Cmd(GENERAL_TIM, ENABLE);
//}
// void GENERAL_ccr4_Mode_Config(int a)
//{
// TIM_OCInitTypeDef TIM_OCInitStructure;
// // 占空比配置
// uint16_t CCR1_Val = a;
// // 配置为PWM模式1
// TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// // 输出使能
// TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// // 输出通道电平极性配置
// TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
//
// // 输出比较通道 4
// TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
// TIM_OC4Init(GENERAL_TIM, &TIM_OCInitStructure);
// TIM_OC4PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// // 使能计数器
// TIM_Cmd(GENERAL_TIM, ENABLE);
//}
void GENERAL_TIM_3_Init()
{
GENERAL_TIM_GPIO_Config();
GENERAL_TIM_Mode_Config();
}
/*********************************************END OF FILE**********************/
#ifndef __BSP_GENERALTIME_H
#define __BSP_GENERALTIME_H
#include "stm32f10x.h"
/************通用定时器TIM参数定义,只限TIM2、3、4、5************/
// 当使用不同的定时器的时候,对应的GPIO是不一样的,这点要注意
// 我们这里默认使用TIM3
#define GENERAL_TIM TIM3
#define GENERAL_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd
#define GENERAL_TIM_CLK RCC_APB1Periph_TIM3
#define GENERAL_TIM_Period 99
#define GENERAL_TIM_Prescaler 71
// TIM3 输出比较通道1
#define GENERAL_TIM_CH1_GPIO_CLK RCC_APB2Periph_GPIOA
#define GENERAL_TIM_CH1_PORT GPIOA
#define GENERAL_TIM_CH1_PIN GPIO_Pin_6
// TIM3 输出比较通道2
#define GENERAL_TIM_CH2_GPIO_CLK RCC_APB2Periph_GPIOA
#define GENERAL_TIM_CH2_PORT GPIOA
#define GENERAL_TIM_CH2_PIN GPIO_Pin_7
TIM3 输出比较通道3
//#define GENERAL_TIM_CH3_GPIO_CLK RCC_APB2Periph_GPIOB
//#define GENERAL_TIM_CH3_PORT GPIOB
//#define GENERAL_TIM_CH3_PIN GPIO_Pin_0
TIM3 输出比较通道4
//#define GENERAL_TIM_CH4_GPIO_CLK RCC_APB2Periph_GPIOB
//#define GENERAL_TIM_CH4_PORT GPIOB
//#define GENERAL_TIM_CH4_PIN GPIO_Pin_1
/**************************函数声明********************************/
void GENERAL_TIM_3_Init(void);
void GENERAL_ccr1_Mode_Config(int a);
void GENERAL_ccr2_Mode_Config(int a);
//void GENERAL_ccr3_Mode_Config(int a);
//void GENERAL_ccr4_Mode_Config(int a);
#endif /* __BSP_GENERALTIME_H */
这是配置GPIO推挽输出高低电平的部分程序。
#include "TB6612.h"
#include "bsp_GeneralTim_3.h"
#include "stm32f10x.h"
void AIN1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(AIN1_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = AIN1_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(AIN1_GPIO_PORT,&GPIO_InitStruct);
}
void AIN2_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(AIN2_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = AIN2_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(AIN2_GPIO_PORT,&GPIO_InitStruct);
}
void BIN1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(BIN1_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = BIN1_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(BIN1_GPIO_PORT,&GPIO_InitStruct);
}
void BIN2_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(BIN2_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = BIN2_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(BIN2_GPIO_PORT,&GPIO_InitStruct);
}
void PWMA_STOP(void)//00为停止
{
AIN1_OFF;
AIN2_OFF;
GENERAL_ccr1_Mode_Config(0);
GENERAL_ccr2_Mode_Config(0);
}
void PWMA_Forward(int a)//01为正转
{
AIN1_OFF;
AIN2_ON;
GENERAL_ccr1_Mode_Config(a);
GENERAL_ccr2_Mode_Config(a);
}
void PWMA_Reverse(int a)//10为反转
{
AIN1_ON;
AIN2_OFF;
GENERAL_ccr1_Mode_Config(a);
GENERAL_ccr2_Mode_Config(a);
}
void PWMB_STOP(void)//00为停止
{
BIN1_OFF;
BIN2_OFF;
GENERAL_ccr1_Mode_Config(0);
GENERAL_ccr2_Mode_Config(0);
}
void PWMB_Forward(int a)//01为正转
{
BIN1_OFF;
BIN2_ON;
GENERAL_ccr1_Mode_Config(a);
GENERAL_ccr2_Mode_Config(a);
}
void PWMB_Reverse(int a)//10为反转
{
BIN1_ON;
BIN2_OFF;
GENERAL_ccr1_Mode_Config(a);
GENERAL_ccr2_Mode_Config(a);
}
void STOP(void)
{
PWMA_STOP();
PWMB_STOP();
}
void Forward(int a)
{
PWMA_Forward(a);
PWMB_Forward(a);
}
void Reverse(int a)
{
PWMA_Reverse(a);
PWMB_Reverse(a);
}
#ifndef TB6612_H
#define TB6612_H
#include "stm32f10x.h"
/*B0端口*/
#define AIN1_GPIO_PIN GPIO_Pin_0
#define AIN1_GPIO_PORT GPIOB
#define AIN1_GPIO_CLK RCC_APB2Periph_GPIOB
/*输出高电平*/
#define AIN1_ON GPIO_SetBits(AIN1_GPIO_PORT,AIN1_GPIO_PIN)
/*输出低电平*/
#define AIN1_OFF GPIO_ResetBits(AIN1_GPIO_PORT,AIN1_GPIO_PIN)
/*B1端口*/
#define AIN2_GPIO_PIN GPIO_Pin_1
#define AIN2_GPIO_PORT GPIOB
#define AIN2_GPIO_CLK RCC_APB2Periph_GPIOB
/*输出高电平*/
#define AIN2_ON GPIO_SetBits(AIN2_GPIO_PORT,AIN2_GPIO_PIN)
/*输出低电平*/
#define AIN2_OFF GPIO_ResetBits(AIN2_GPIO_PORT,AIN2_GPIO_PIN)
/*B10端口*/
#define BIN1_GPIO_PIN GPIO_Pin_10
#define BIN1_GPIO_PORT GPIOB
#define BIN1_GPIO_CLK RCC_APB2Periph_GPIOB
/*输出高电平*/
#define BIN1_ON GPIO_SetBits(BIN1_GPIO_PORT,BIN1_GPIO_PIN)
/*输出低电平*/
#define BIN1_OFF GPIO_ResetBits(BIN1_GPIO_PORT,BIN1_GPIO_PIN)
/*B11端口*/
#define BIN2_GPIO_PIN GPIO_Pin_11
#define BIN2_GPIO_PORT GPIOB
#define BIN2_GPIO_CLK RCC_APB2Periph_GPIOB
/*输出高电平*/
#define BIN2_ON GPIO_SetBits(BIN2_GPIO_PORT,BIN2_GPIO_PIN)
/*输出低电平*/
#define BIN2_OFF GPIO_ResetBits(BIN2_GPIO_PORT,BIN2_GPIO_PIN)
void AIN1_GPIO_Config(void);
void AIN2_GPIO_Config(void);
void PWMA_STOP(void);
void PWMA_Forward(int a);
void PWMA_Reverse(int a);
void BIN1_GPIO_Config(void);
void BIN2_GPIO_Config(void);
void PWMB_STOP(void);
void PWMB_Forward(int a);
void PWMB_Reverse(int a);
void STOP(void);
void Forward(int a);
void Reverse(int a);
#endif
我个人认为只有右边的VM和VCC还有为什么会有两个GND,这一部分没有说清楚,接下来我会实际的测试一下这四个引脚,搞清楚了再来更新。
遇到好多初学者来问这篇文章的相关问题,我最近抽空写一个手把手教学。——2022.2.27
【如果忘了,提醒我一下。】

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 75
75 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)