
自动控制理论(5)——二阶系统的时域分析
系列文章目录自动控制理论(1)——自动控制理论概述自动控制理论(2)——控制系统的数学模型(微分方程、传递函数自动控制理论(3)——控制系统的数学模型(系统框图和信号流图自动控制理论(4)——系统的时域性能指标和一阶系统的时域分析文章目录系列文章目录一、二阶系统数学模型二、二阶系统单位阶跃响应1. ζ=0\ ζ=0 ζ=0(零阻尼)2. ζ>1\ ζ>1&
系列文章目录
自动控制理论(1)——自动控制理论概述
自动控制理论(2)——控制系统的数学模型(微分方程、传递函数
自动控制理论(3)——控制系统的数学模型(系统框图和信号流图
自动控制理论(4)——系统的时域性能指标和一阶系统的时域分析
文章目录
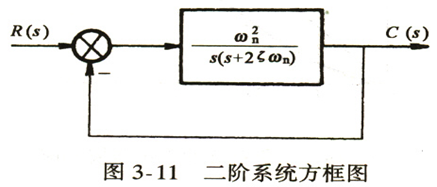
一、二阶系统数学模型
开环
G
(
s
)
=
ω
n
2
s
(
s
+
2
ζ
ω
n
)
\ G(s)=\frac{ω_n^2}{s(s+2ζω_n)}
G(s)=s(s+2ζωn)ωn2
闭环
ϕ
(
s
)
=
ω
n
2
s
2
+
2
ζ
ω
n
s
+
ω
n
2
\ ϕ(s)=\frac{ω_n^2}{s^2+2ζω_n s+ω_n^2 }
ϕ(s)=s2+2ζωns+ωn2ωn2
特征方程
s
2
+
2
ζ
ω
n
s
+
ω
n
2
=
0
\ s^2+2ζω_n s+ω_n^2=0
s2+2ζωns+ωn2=0
ζ
\ ζ
ζ——阻尼比
ω
n
\ ω_n
ωn——无阻尼自然振荡角频率
σ
=
ζ
ω
n
\ σ=ζω_n
σ=ζωn——衰减系数
ω
d
=
ω
n
√
(
1
−
ζ
2
)
\ ω_d=ω_n √(1-ζ^2 )
ωd=ωn√(1−ζ2)——系统的阻尼振荡角频率
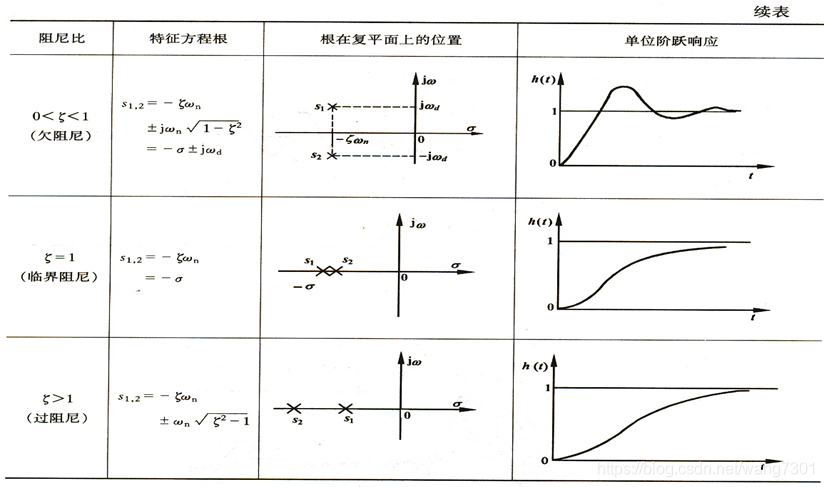
二、二阶系统单位阶跃响应
1. ζ = 0 \ ζ=0 ζ=0(零阻尼)
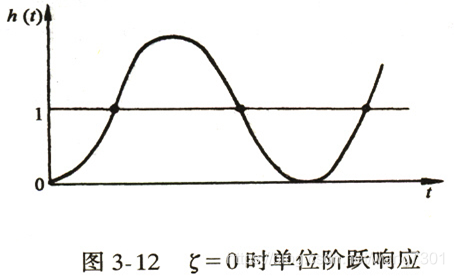
响应曲线为等幅振荡曲线。
2. ζ > 1 \ ζ>1 ζ>1( 过阻尼)
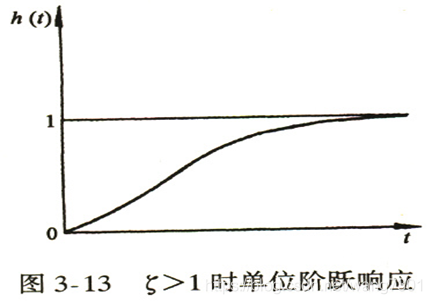
两个不等负实根
3. ζ = 1 \ ζ=1 ζ=1( 临界阻尼)
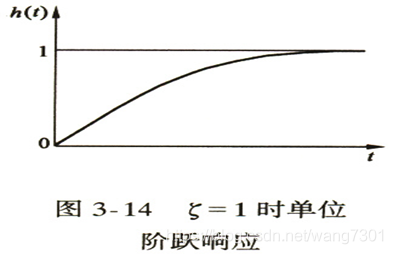
两个相等的负实根
4. 0 < ζ < 1 \ 0<ζ<1 0<ζ<1( 欠阻尼)
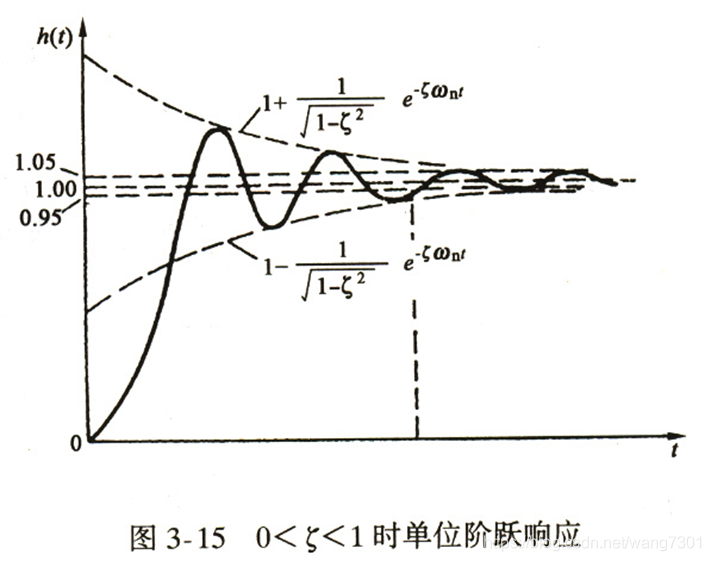
两个共轭复根
s
1
,
2
=
−
ζ
ω
n
±
j
ω
n
√
(
1
−
ζ
2
)
\ s_{1,2}=-ζω_n±jω_n √(1-ζ^2 )
s1,2=−ζωn±jωn√(1−ζ2)
阻尼角
β
=
t
g
−
1
√
(
1
−
ζ
2
)
ζ
\ β=tg^{-1} \frac{√(1-ζ^2 )}{ζ}
β=tg−1ζ√(1−ζ2)
5.总结

三 、欠阻尼二阶系统性能指标计算
1.上升时间 t r \ t_r tr
t
r
=
π
−
β
ω
n
√
(
1
−
ζ
2
)
\ t_r=\frac{π-β}{ω_n √(1-ζ^2 )}
tr=ωn√(1−ζ2)π−β
阻尼比一定时,响应速度与
ω
n
\ ω_n
ωn成正比;
阻尼振荡频率
ω
d
\ ω_d
ωd一定时,阻尼比越小,上升时间越短。
2.峰值时间 t p \ t_p tp
t
p
=
π
ω
n
√
(
1
−
ζ
2
)
\ t_p=\frac{π}{ω_n √(1-ζ^2 )}
tp=ωn√(1−ζ2)π
峰值时间与闭环极点的虚部成反比,闭环极点离负实轴越远,峰值时间越短。
3.超调量 σ % \ σ\% σ%
σ
%
=
e
−
ζ
π
√
(
1
−
ζ
2
)
\ σ\%=e^{\frac{-ζπ}{√(1-ζ^2 )}}
σ%=e√(1−ζ2)−ζπ
超调量只与阻尼比有关,阻尼越大,超调越小。
4.调节时间 t s \ t_s ts
t
s
=
4
ζ
ω
n
\ t_s=\frac{4}{ζω_n }
ts=ζωn4 (
Δ
=
2
%
\ Δ=2\%
Δ=2%)
或
t
s
=
3
ζ
ω
n
\ t_s=\frac{3}{ζω_n }
ts=ζωn3 (
Δ
=
5
%
\ Δ=5\%
Δ=5%)
5.延迟时间 t d \ t_d td
当
0
<
ζ
<
1
\ 0<ζ<1
0<ζ<1 时,
t
d
=
1
+
0.7
ζ
ω
n
\ t_d=\frac{1+0.7ζ}{ω_n }
td=ωn1+0.7ζ
增大自然频率或减小阻尼比,可以减小延迟时间。
四 、具有零点的二阶系统分析
1、原系统条件不变时,附加一个闭环零点,将使二阶系统阶跃响应的超调量增大,上升时间和峰值时间减小
2、零点距离极点越近,上述影响越显著
3、零点距离虚轴很远时,零点影响可忽略

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐


 23
23 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)