概率密度变换公式 雅可比矩阵_机器人学-课时3-4-雅可比矩阵2
上一篇 雅可比矩阵1heng2617:机器人学-课时3-3-雅可比矩阵1zhuanlan.zhihu.com 这一节将讨论雅可比矩阵与力。 如上图所示的模型中,一个手臂在擦玻璃,有一个对玻璃表面的力,关节上的扭矩为和。它们满足如下等式: 其中, 代入:这是work-space的到configuration-space 的的映射。如果我们不讨论位移或速度,而是讨论...
·
上一篇 雅可比矩阵1
heng2617:机器人学-课时3-3-雅可比矩阵1zhuanlan.zhihu.com这一节将讨论雅可比矩阵与力。
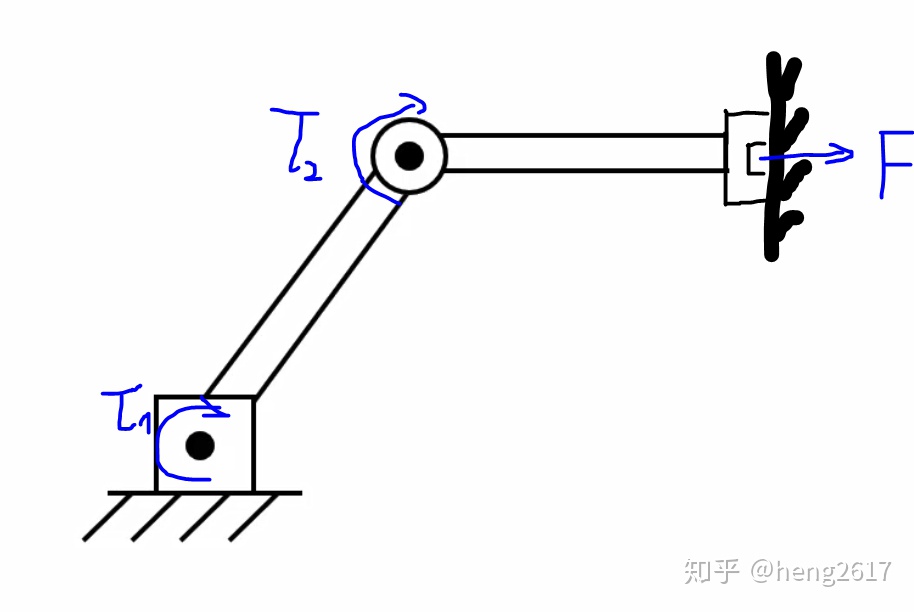
如上图所示的模型中,一个手臂在擦玻璃,有一个对玻璃表面的力
其中
代入
这是work-space的
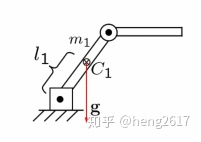
例:前面章节的重力补偿:
heng2617:机器人-课时2-2-重力模型zhuanlan.zhihu.com这里用雅可比重新计算重力补偿。
一般情况下,
其中,
具体的:
则有:
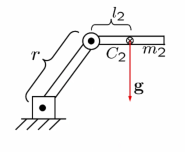
有:
总结
雅可比可以干什么:
- 雅可比将configuration-space的速度转化为work-space的速度
- 雅可比将configuration-space的位移转化为work-space的位移
- 雅可比将work-space的速度转化为configuration-space的速度
- 雅可比将work-space的位移转化为configuration-space的位移
- 雅可比将work-space的力转化为configuration-space的力(扭矩)
其中第三条和第四条有时可以计算出来有时不能,要看
下一节 奇异性
heng2617:机器人学-3-5-雅可比矩阵3zhuanlan.zhihu.com
CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)