android usb device host 切换_从Harmony驱动架构来看是不是套用Android
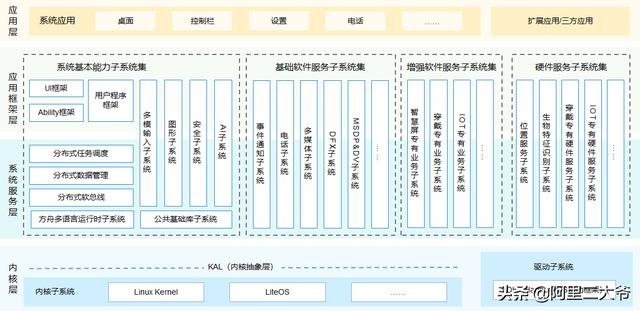
最近HarmonyOS 2.0Beta出来了,大家伙看了界面,很多人说这不就是Android,尤其是头条上一些人;大家都知道Android是基于Linux内核开发的,HarmonyOS是全新微内核(官方说法,具体啥意思不做探究),下面我们就拿linux驱动和HarmonyOS驱动做个对比,看看到底是不是套用!驱动概述HarmonyOS Driver FoundationHDF(HarmonyOS
最近HarmonyOS 2.0Beta出来了,大家伙看了界面,很多人说这不就是Android,尤其是头条上一些人;大家都知道Android是基于Linux内核开发的,HarmonyOS是全新微内核(官方说法,具体啥意思不做探究),下面我们就拿linux驱动和HarmonyOS驱动做个对比,看看到底是不是套用!
驱动概述
HarmonyOS Driver Foundation
HDF(HarmonyOS Driver Foundation)驱动框架,为驱动开发者提供驱动框架能力,包括驱动加载、驱动服务管理和驱动消息机制。旨在构建统一的驱动架构平台,为驱动开发者提供更精准、更高效的开发环境,力求做到一次开发,多系统部署。
概念性的东西,看不出啥来
驱动加载
HDF驱动加载包括按需加载和按序加载。
- 按需加载HDF框架支持驱动在系统启动过程中默认加载,或者在系统启动之后动态加载。
- 按序加载HDF框架支持驱动在系统启动的过程中按照驱动的优先级进行加载。
linux中也可以动态加载驱动模块,也可以设置优先级
驱动服务管理
HDF框架可以集中管理驱动服务,开发者可直接通过HDF框架对外提供的能力接口获取驱动相关的服务。
驱动消息机制
HDF框架提供统一的驱动消息机制,支持用户态应用向内核态驱动发送消息,也支持内核态驱动向用户态应用发送消息。
驱动模型介绍
HDF框架以组件化的驱动模型作为核心设计思路,为开发者提供更精细化的驱动管理,让驱动开发和部署更加规范。HDF框架将一类设备驱动放在同一个host里面,开发者也可以将驱动功能分层独立开发和部署,支持一个驱动多个node,HDF框架管理驱动模型如下图所示:
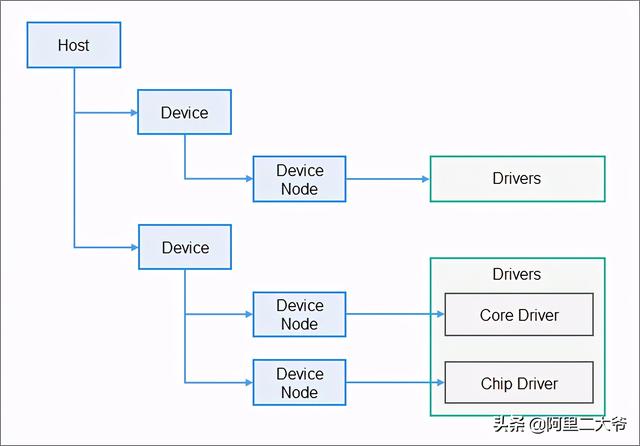
上面这些概念分别都可以在linux中找到对应的概念或者说法
概念上看不出来,下面我们就看具体代码
驱动开发步骤示例
基于HDF框架进行驱动的开发主要分为两个部分,驱动实现和驱动配置,详细开发流程如下所示:
- 驱动实现
驱动实现包含驱动业务代码和驱动入口注册,具体写法如下: 驱动业务代码
#include "hdf_device_desc.h" // HDF框架对驱动开放相关能力接口的头文件#include "hdf_log.h" // HDF 框架提供的日志接口头文件 #define HDF_LOG_TAG sample_driver // 打印日志所包含的标签,如果不定义则用默认定义的HDF_TAG标签 //驱动对外提供的服务能力,将相关的服务接口绑定到HDF框架int32_t HdfSampleDriverBind(struct HdfDeviceObject *deviceObject){ HDF_LOGD("Sample driver bind success"); return 0;} // 驱动自身业务初始的接口int32_t HdfSampleDriverInit(struct HdfDeviceObject *deviceObject){ HDF_LOGD("Sample driver Init success"); return 0;} // 驱动资源释放的接口void HdfSampleDriverRelease(struct HdfDeviceObject *deviceObject){ HDF_LOGD("Sample driver release success"); return;}首先说代码风格,linux代码是这种“hdf_sample_driver_release”小写加下划线的风格,Harmony是驼峰式写法。
驱动入口注册到HDF框架
// 定义驱动入口的对象,必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量struct HdfDriverEntry g_sampleDriverEntry = { .moduleVersion = 1, .moduleName = "sample_driver", .Bind = HdfSampleDriverBind, .Init = HdfSampleDriverInit, .Release = HdfSampleDriverRelease,}; // 调用HDF_INIT将驱动入口注册到HDF框架中,在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动,当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。HDF_INIT(g_sampleDriverEntry);这个注册跟下面这个linux驱动还是有些相似的,虽说条条大路通罗马,但路先让别人走了,我们再走,不能算抄袭。
// linux内核任意摘取的驱动static struct i2c_driver bd2802_i2c_driver = {.driver= {.name= "BD2802",.pm= &bd2802_pm,},.probe= bd2802_probe,.remove= bd2802_remove,.id_table= bd2802_id,};module_i2c_driver(bd2802_i2c_driver);- 驱动编译
编译都是采用的Makefile,这个没啥好说的。
- 驱动代码的编译必须要使用HDF框架提供的Makefile模板进行编译。
include $(LITEOSTOPDIR)/../../drivers/hdf/lite/lite.mk #导入hdf预定义内容,必需MODULE_NAME := #生成的结果文件LOCAL_INCLUDE := #本驱动的头文件目录LOCAL_SRCS := #本驱动的源代码文件LOCAL_CFLAGS := #自定义的编译选项include $(HDF_DRIVER) #导入模板makefile完成编译编译结果文件链接到内核镜像,添加到vendor目录下的hdf_vendor.mk里面,示例如下:
LITEOS_BASELIB += -lxxx #链接生成的静态库LIB_SUBDIRS += #驱动代码Makefile的目录3.驱动配置
HDF使用HCS作为配置描述源码,HCS详细介绍参考配置管理介绍。
驱动配置包含两部分,HDF框架定义的驱动设备描述和驱动的私有配置信息,具体写法如下:
- 驱动设备描述(必选)HDF框架加载驱动所需要的信息来源于HDF框架定义的驱动设备描述,因此基于HDF框架开发的驱动必须要在HDF框架定义的device_info.hcs配置文件中添加对应的设备描述,驱动的设备描述填写如下所示:
root { device_info { match_attr = "hdf_manager"; template host { // host模板,继承该模板的节点(如下sample_host)如果使用模板中的默认值,则节点字段可以缺省 hostName = ""; priority = 100; template device { template deviceNode { policy = 0; priority = 100; preload = 0; permission = 0664; moduleName = ""; serviceName = ""; deviceMatchAttr = ""; } } } sample_host :: host{ hostName = "host0"; // host名称,host节点是用来存放某一类驱动的容器 priority = 100; // host启动优先级(0-200),值越大优先级越低,建议默认配100,优先级相同则不保证host的加载顺序 device_sample :: device { // sample设备节点 device0 :: deviceNode { // sample驱动的DeviceNode节点 policy = 1; // policy字段是驱动服务发布的策略,在驱动服务管理章节有详细介绍 priority = 100; // 驱动启动优先级(0-200),值越大优先级越低,建议默认配100,优先级相同则不保证device的加载顺序 preload = 0; // 驱动按需加载字段,在本章节最后的说明有详细介绍 permission = 0664; // 驱动创建设备节点权限 moduleName = "sample_driver"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致 serviceName = "sample_service"; // 驱动对外发布服务的名称,必须唯一 deviceMatchAttr = "sample_config"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等 } } } }}下面这个是任意摘录自linux源码
dw-apb-gpio@2000 {compatible = "snps,dw-apb-gpio";reg = < 0x2000 0x80 >;#address-cells = <1>;#size-cells = <0>;ictl_intc: gpio-controller@0 {compatible = "snps,dw-apb-gpio-port";gpio-controller;#gpio-cells = <2>;snps,nr-gpios = <30>;reg = <0>;interrupt-controller;#interrupt-cells = <2>;interrupt-parent = ;interrupts = <25>;};};无论是概念思路还是代码风格都跟Linux的设备树(DeviceTree)似乎异曲同工;虽说条条大路通罗马,但路先让别人走了,我们再走,不能算抄袭。
驱动私有配置信息(可选)
如果驱动有私有配置,则可以添加一个驱动的配置文件,用来填写一些驱动的默认配置信息,HDF框架在加载驱动的时候,会将对应的配置信息获取并保存在HdfDeviceObject 中的property里面,通过Bind和Init(参考驱动开发)传递给驱动,驱动的配置信息示例如下:
root { SampleDriverConfig { sample_version = 1; sample_bus = "I2C_0"; match_attr = "sample_config"; //该字段的值必须和device_info.hcs中的deviceMatchAttr值一致 }}>linux设备树中似乎没这个概念
配置信息定义之后,需要将该配置文件添加到板级配置入口文件hdf.hcs(这一块可以通过HarmonyOS驱动子系统在DevEco集成驱动开发套件工具一键式配置,具体使用方法参考驱动开发套件中的介绍),示例如下:
#include "device_info/device_info.hcs"#include "sample/sample_config.hcs"驱动服务管理
驱动服务是HDF驱动设备对外提供能力的对象,由HDF框架统一管理。驱动服务管理主要包含驱动服务的发布和获取。
HDF框架定义了驱动对外发布服务的策略,是由配置文件中的policy字段来控制,policy字段的取值范围以及含义如下:
typedef enum { /* 驱动不提供服务 */ SERVICE_POLICY_NONE = 0, /* 驱动对内核态发布服务 */ SERVICE_POLICY_PUBLIC = 1, /* 驱动对内核态和用户态都发布服务 */ SERVICE_POLICY_CAPACITY = 2, /* 驱动服务不对外发布服务,但可以被订阅 */ SERVICE_POLICY_FRIENDLY = 3, /* 驱动私有服务不对外发布服务,也不能被订阅 */ SERVICE_POLICY_PRIVATE = 4, /* 错误的服务策略 */ SERVICE_POLICY_INVALID} ServicePolicy;这个地方,嗯,似乎LINUX没有这个概念,更像IOT中的一些通信协议比如MQTT中的一些概念,放在操作系统中是比较新的概念,就像华为说的物联网操作系统。
使用场景
当驱动以接口的形式对外提供能力时,可以使用HDF框架的驱动服务管理能力。
接口说明
针对驱动服务管理功能,HDF框架开放了以下接口供开发者调用,如下表所示:

开发步骤
驱动服务管理的开发包括驱动服务的编写、绑定、获取或者订阅,详细步骤如下。
- 驱动服务发布
驱动服务结构的定义struct ISampleDriverService { struct IDeviceIoService ioService; // 服务结构的首个成员必须是IDeviceIoService类型的成员 int32_t (*ServiceA)(void); // 驱动的第一个服务接口 int32_t (*ServiceB)(uint32_t inputCode); // 驱动的第二个服务接口,有多个可以依次往下累加}; 驱动服务接口的实现int32_t SampleDriverServiceA(void){ // 驱动开发者实现业务逻辑 return 0;} int32_t SampleDriverServiceB(uint32_t inputCode){ // 驱动开发者实现业务逻辑 return 0;}驱动服务绑定到HDF框架中,实现HdfDriverEntry中的Bind指针函数。
int32_t SampleDriverBind(struct HdfDeviceObject *deviceObject){ // deviceObject为HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口 if (deviceObject == NULL) { HDF_LOGE("Sample device object is null!"); return -1; } static struct ISampleDriverService sampleDriverA = { .ServiceA = SampleDriverServiceA, .ServiceB = SampleDriverServiceB, }; deviceObject->service = &sampleDriverA.ioService; return 0;}驱动服务获取。
驱动服务的获取有两种方式,HDF框架提供接口直接获取和HDF框架提供订阅机制获取。
- 通过HDF接口直接获取当明确驱动已经加载完成时,获取该驱动的服务可以通过HDF框架提供的能力接口直接获取,如下所示:
const struct ISampleDriverService *sampleService = (const struct ISampleDriverService *)DevSvcManagerClntGetService("sample_driver");if (sampleService == NULL) { return -1;}sampleService->ServiceA();sampleService->ServiceB(5);通过HDF提供的订阅机制获取
当对驱动(同一个host)加载的时机不感知时,可以通过HDF框架提供的订阅机制来订阅该驱动,当该驱动加载完成时,HDF框架会将被订阅的驱动服务发布给订阅者,实现方式如下所示:
// 订阅回调函数的编写,当被订阅的驱动加载完成后,HDF框架会将被订阅驱动的服务发布给订阅者,通过这个回调函数给订阅者使用// object为订阅者的私有数据,service为被订阅的服务对象int32_t TestDriverSubCallBack(struct HdfDeviceObject *deviceObject, const struct HdfObject *service){ const struct ISampleDriverService *sampleService = (const struct ISampleDriverService *)service; if (sampleService == NULL) { return -1; } sampleService->ServiceA(); sampleService->ServiceB(5);}// 订阅过程的实现int32_t TestDriverInit(struct HdfDeviceObject *deviceObject){ if (deviceObject == NULL) { HDF_LOGE("Test driver init failed, deviceObject is null!"); return -1; } struct SubscriberCallback callBack; callBack.deviceObject = deviceObject; callBack.OnServiceConnected = TestDriverSubCallBack; int32_t ret = HdfDeviceSubscribeService(deviceObject, "sample_driver", callBack); if (ret != 0) { HDF_LOGE("Test driver subscribe sample driver failed!"); } return ret;}驱动消息机制管理
使用场景
当用户态应用和内核态驱动需要交互时,可以使用HDF框架的消息机制来实现。
接口说明
消息机制的功能主要有以下两种:
- 用户态应用发送消息到驱动。
- 用户态应用接收驱动主动上报事件。

开发步骤
- 将驱动配置信息中服务策略policy字段设置为2(SERVICE_POLICY_CAPACITY,参考policy定义)。
device_sample :: Device { policy = 2; ...}- 配置驱动信息中的服务设备节点权限(permission字段)是框架给驱动创建设备节点的权限,默认是0666,驱动开发者根据驱动的实际使用场景配置驱动设备节点的权限。
- 在服务实现过程中,实现服务基类成员IDeviceIoService中的Dispatch方法。
// Dispatch是用来处理用户态发下来的消息int32_t SampleDriverDispatch(struct HdfDeviceObject *device, int cmdCode, struct HdfSBuf *data, struct HdfSBuf *reply){ HDF_LOGE("sample driver lite A dispatch"); return 0;}int32_t SampleDriverBind(struct HdfDeviceObject *device){ HDF_LOGE("test for lite os sample driver A Open!"); if (device == NULL) { HDF_LOGE("test for lite os sample driver A Open failed!"); return -1; } static struct ISampleDriverService sampleDriverA = { .ioService.Dispatch = SampleDriverDispatch, .ServiceA = SampleDriverServiceA, .ServiceB = SampleDriverServiceB, }; device->service = (struct IDeviceIoService *)(&sampleDriverA); return 0;}- 驱动定义消息处理函数中的cmd类型。
#define SAMPLE_WRITE_READ 1 // 读写操作码1- 用户态获取服务接口并发送消息到驱动。
int SendMsg(const char *testMsg){ if (testMsg == NULL) { HDF_LOGE("test msg is null"); return -1; } struct HdfIoService *serv = HdfIoServiceBind("sample_driver", 0); if (serv == NULL) { HDF_LOGE("fail to get service"); return -1; } struct HdfSBuf *data = HdfSBufObtainDefaultSize(); if (data == NULL) { HDF_LOGE("fail to obtain sbuf data"); return -1; } struct HdfSBuf *reply = HdfSBufObtainDefaultSize(); if (reply == NULL) { HDF_LOGE("fail to obtain sbuf reply"); ret = HDF_DEV_ERR_NO_MEMORY; goto out; } if (!HdfSbufWriteString(data, testMsg)) { HDF_LOGE("fail to write sbuf"); ret = HDF_FAILURE; goto out; } int ret = serv->dispatcher->Dispatch(&serv->object, SAMPLE_WRITE_READ, data, reply); if (ret != HDF_SUCCESS) { HDF_LOGE("fail to send service call"); goto out; }out: HdfSBufRecycle(data); HdfSBufRecycle(reply); HdfIoServiceRecycle(serv); return ret;}- 用户态接收该驱动上报的消息。
a.用户态编写驱动上报消息的处理函数。
static int OnDevEventReceived(void *priv, uint32_t id, struct HdfSBuf *data){ OsalTimespec time; OsalGetTime(&time); HDF_LOGE("%s received event at %llu.%llu", (char *)priv, time.sec, time.usec); const char *string = HdfSbufReadString(data); if (string == NULL) { HDF_LOGE("fail to read string in event data"); return -1; } HDF_LOGE("%s: dev event received: %d %s", (char *)priv, id, string); return 0;}b.用户态注册接收驱动上报消息的操作方法。
int RegisterListen(){ struct HdfIoService *serv = HdfIoServiceBind("sample_driver", 0); if (serv == NULL) { HDF_LOGE("fail to get service"); return -1; } static struct HdfDevEventlistener listener = { .callBack = OnDevEventReceived, .priv ="Service0" }; if (HdfDeviceRegisterEventListener(serv, &listener) != 0) { HDF_LOGE("fail to register event listener"); return -1; } ...... HdfDeviceUnregisterEventListener(serv, &listener); HdfIoServiceRecycle(serv); return 0;}c.驱动上报事件
int32_t SampleDriverDispatch(struct HdfDeviceObject *device, int cmdCode, struct HdfSBuf *data, struct HdfSBuf *reply){ ... // process api call here return HdfDeviceSendEvent(deviceObject, cmdCode, data);}从驱动的服务管理、消息机制管理可以看出跟Linux驱动是截然不同的。
至于配置管理和Linux驱动中的设备树极为相似,以及内核中的shell、adb、api接口的名字相似等,我觉得这个说明不了什么,毕竟linux几十年了,有些比较先进的理念,我们采用了不能说我们就套用了。还是那句话,条条大路通罗马,人家选择一条好的路先走了,我们不能为了避嫌故意选择一条差的路吧。你们说呢?

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐


 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)