机器人学中的状态估计 中文版_机器人学中的状态估计第五章习题答案
## 5.5.1A=1,B=1,C=1增广系统可观测## 5.5.2其中增广系统可观测## 5.5.3根据式(5.3.7)迭代次数## 5.5.4从上面第一章图可以看出,当前鲁棒函数在使用平方损失函数加快收敛速度从第二章图,代价函数的导数绝对值函数可以看出,在无外点干扰的情况下,平方代价函数收敛更快在,本鲁棒代价函数相比平方代价函数对外点的抑制作用更...
·
## 5.5.1
A=1,B=1,C=1
增广系统可观测
## 5.5.2
其中
增广系统可观测
## 5.5.3
根据式(5.3.7)
迭代次数
## 5.5.4
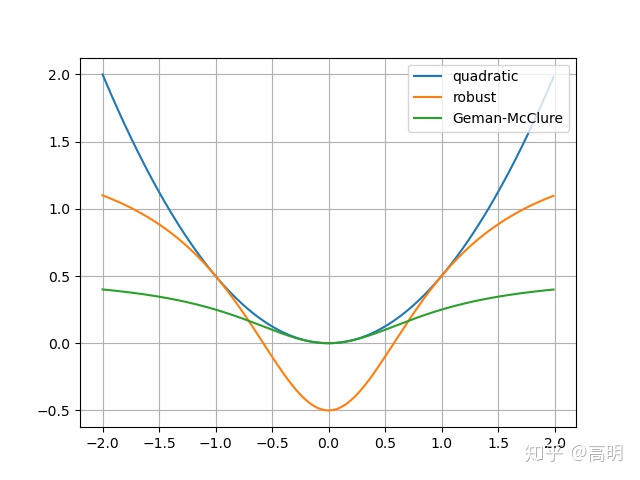
从上面第一章图可以看出,当前鲁棒函数在
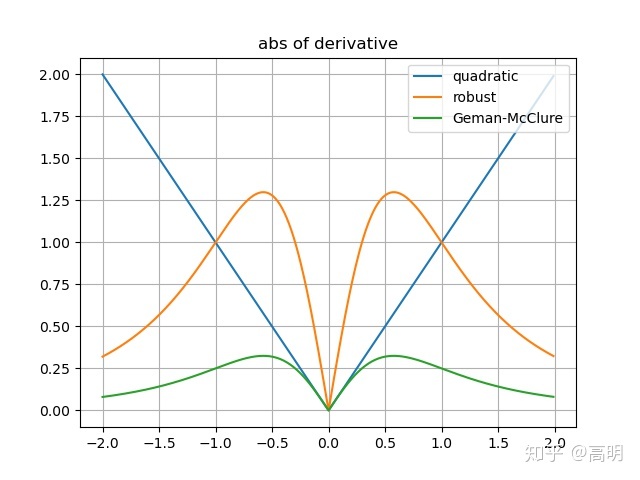
从第二章图,代价函数的导数绝对值函数可以看出,在无外点干扰的情况下,平方代价函数收敛更快
在
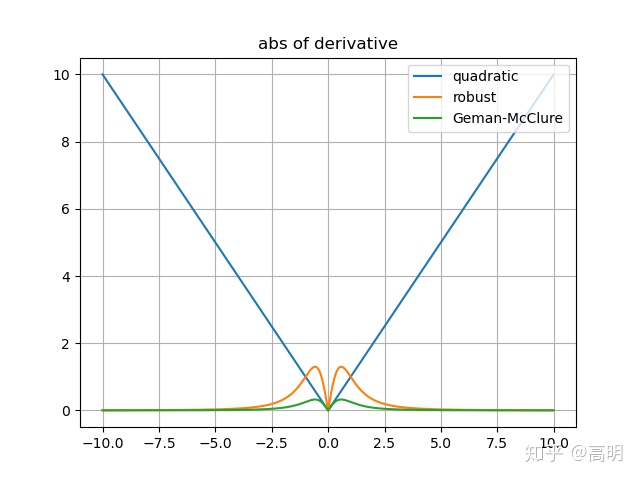
可以看到,该算法在外点偏大区域与German-McClure代价函数具有相当的抑制作用。
总结:在非外点区域更快迭代收敛,在外点偏大区域具备相当的异常抑制作用,既鲁棒又快
源码和pdf地址:
https://github.com/mingtiancai/estimation_for_robotics_answer/tree/master/csgithub.com
CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)