
louvain算法_社区发现算法综述—part2—infomap
infomap这个算法确实不好理解,所以独立开一章来学习。首先回顾下louvain的算法实现过程:而infomap的算法实现过程:1、最开始,每个原始节点堪称一个独立的社区;2、对图里的节点随机采样出一个序列,按顺序依次尝试将每个节点赋给邻居节点所在的社区,取平均比特下降最大时的社区赋给该节点,如果没有下降,该节点的社区不变;3、重复步骤2直到平均每步编码长度收敛为止。louvain和infoma
infomap这个算法确实不好理解,所以独立开一章来学习。
首先回顾下louvain的算法实现过程:
而infomap的算法实现过程:
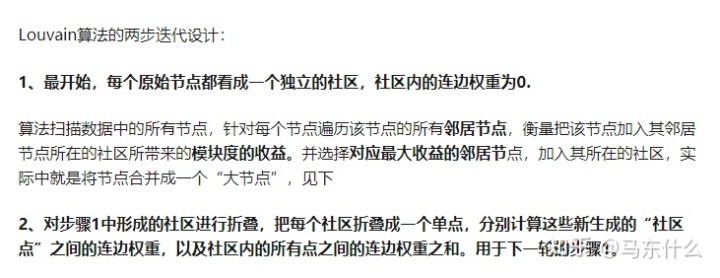
1、最开始,每个原始节点堪称一个独立的社区;
2、对图里的节点随机采样出一个序列,按顺序依次尝试将每个节点赋给邻居节点所在的社区,取平均比特下降最大时的社区赋给该节点,如果没有下降,该节点的社区不变;
3、重复步骤2直到平均每步编码长度收敛为止。
louvain和infomap都是遵循一种自下而上的思路,类似于凝聚聚类,而不同之处在于:
1、louvain使用模块度增益而infomap使用平均比特增益用于决定如何合并社区;
2、louvain遍历所有节点的邻节点而infomap则是通过random walk随机采样;
下面就来详细解释一下:
数据压缩与信息熵 - 阮一峰的网络日志www.ruanyifeng.com
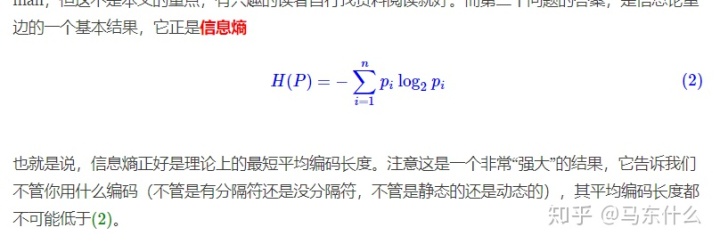
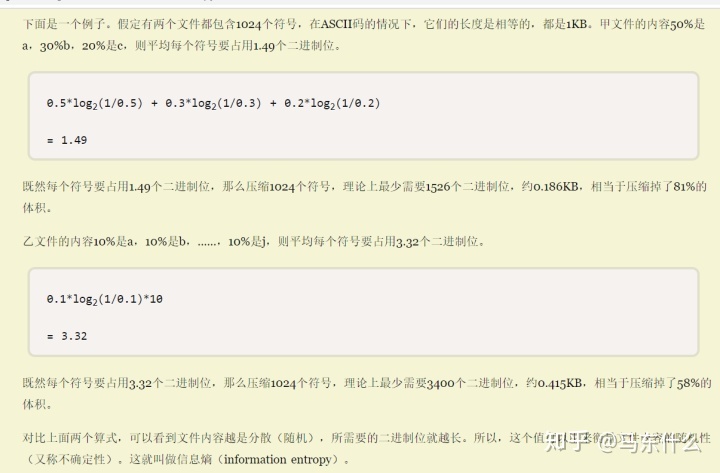
首先需要了解,信息熵(对,就是西瓜书的决策树那一章节里的那个信息熵,二者是完全相同的)和平均每步编码长度的关系。上述的文章写的非常清晰易懂,这里就不复制黏贴了,给定了关于数据压缩的背景,
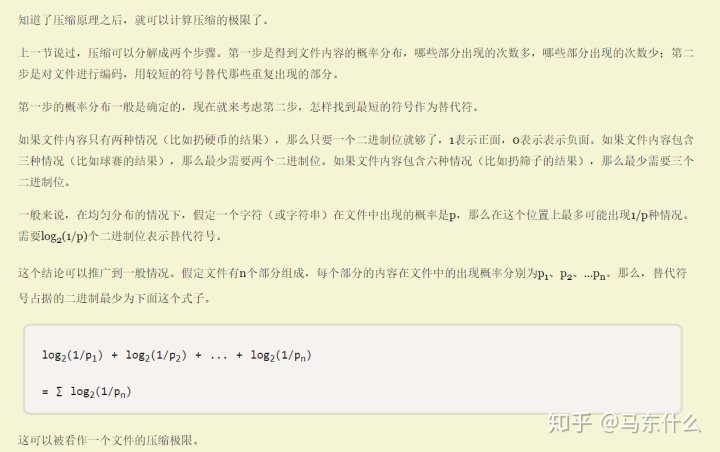
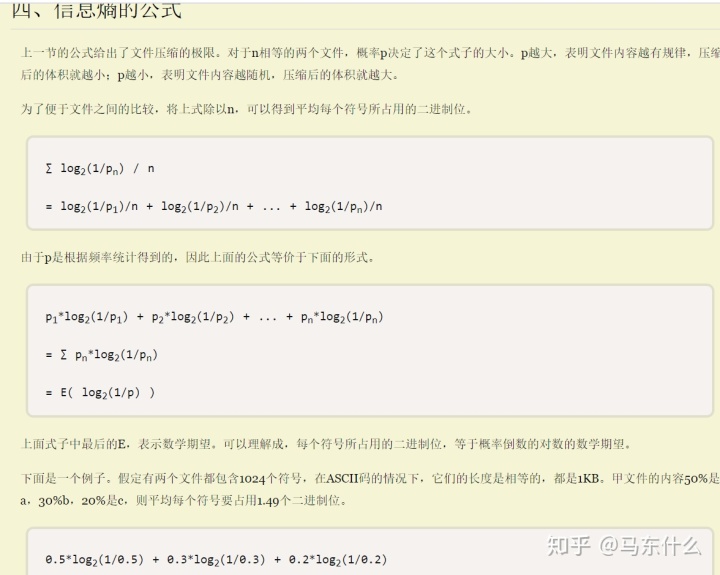
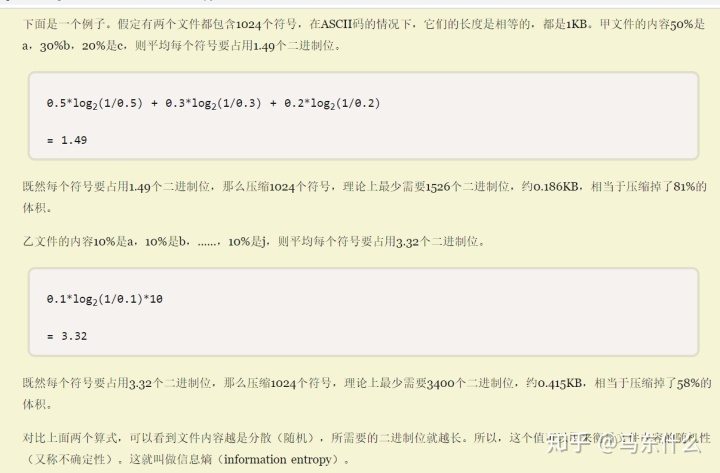
信息熵=最小平均编码长度
原文来自:
最小熵原理(五):“层层递进”之社区发现与聚类 - 科学空间|Scientific Spaceskexue.fm
我们常说信息熵用于衡量事物的不确定性,信息熵越大则不确定性越小,早期的决策树通过分裂,是一个不断的降低信息熵,也就是降低不确定性的过程,而infomap则是从平均编码长度的角度来论述信息熵在该算法中的角色; 可以看到,数据中概率的分布越均匀(数据的不确定性越大),则理论最短平均编码越大,即信息熵越大。
而infomap 的设计目的,是为了:
Infomap 将社区发现同信息编码(数据压缩)联系到了一起。 一个好的社区划分,可以带来更短的编码。所以,如果能量化编码长度,找到使得长度最短的社区划分,那就找到了一个好的社区划分。
这是infomap的重要思想。(直观上来体会也比较让人好接受,假设我们没有划分社区,也就是假设每一个节点都是一个社区,那么对于人类的直观感受来说原始的图数据的混乱程度很高,信息熵大,如果说节点有序的划分为不同的社区,对于人类的直观感受来说原始的图数据的混乱程度就降低了)
注意,我们这里谈及的编码都是 二进制编码的形式,也就是编码的方式都是通过0,1的方式来进行编码的。
那么对于图数据来说,怎么去编码?刚接触的时候我的第一反应是,这怎么编码,每个节点都是独立的,这岂不是一个均匀分布?按照这个例子:
假设有100个节点,每个节点出现的概率是1/100,那么按照公式不是可以直接计算出来其最短平均编码长度了(信息熵)了吗。。。
但是实际上是这样的:
给定变量X,变量 X的样本空间是图上所有节点的集合, X的概率分布为网络所有节点被随机游走访问的频率分布
这意味着,图上的节点的概率分布不是直接通过统计的方法来计算的(如果通过这种方式计算,那么显然所有节点的出现概率都是1/n,n表示节点数量)节点的概率分布为网络所有节点被随机游走访问的频率分布。
太难了。。。先这样吧。。头看炸

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐

 1
1 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)