xyz坐标图_机器人学基础(一)——数理基础(坐标转换平移)
对于学习研究机器人来说,坐标转换是绕不过去的,所以本篇文章主要介绍坐标转换中的平移转换。在学习之前先介绍几个定义:坐标转换:空间中任一点P在不同坐标系中的描述是不同的。为了阐明从一个坐标系的描述到另一个坐标系的描述关系。平移坐标转换:以向量(vector)P来描述坐标{B}原点相对于坐标{A}的状态。如下图:两个坐标系:世界坐标系W(world frame)和坐标系B(body frame),坐标
对于学习研究机器人来说,坐标转换是绕不过去的,所以本篇文章主要介绍坐标转换中的平移转换。
在学习之前先介绍几个定义:
坐标转换:空间中任一点P在不同坐标系中的描述是不同的。为了阐明从一个坐标系的描述到另一个坐标系的描述关系。
平移坐标转换:以向量(vector)P来描述坐标{B}原点相对于坐标{A}的状态。
如下图:两个坐标系:世界坐标系W(world frame)和坐标系B(body frame),坐标系B的原点和质心重合。我们要想获得质心的移动状态,就可以只关心坐标系B原点的移动状态就可以了。所以我们需要量化他们之间的关系,如图中所示,可以用一个向量P从world frame的原点出发指向body frame原点。因为向量P是空间向量,所以他有三个分量Px,Py,Pz。因此,只要我们只要知道这三个分量,就可以知道质心随时间在world frame的位置。
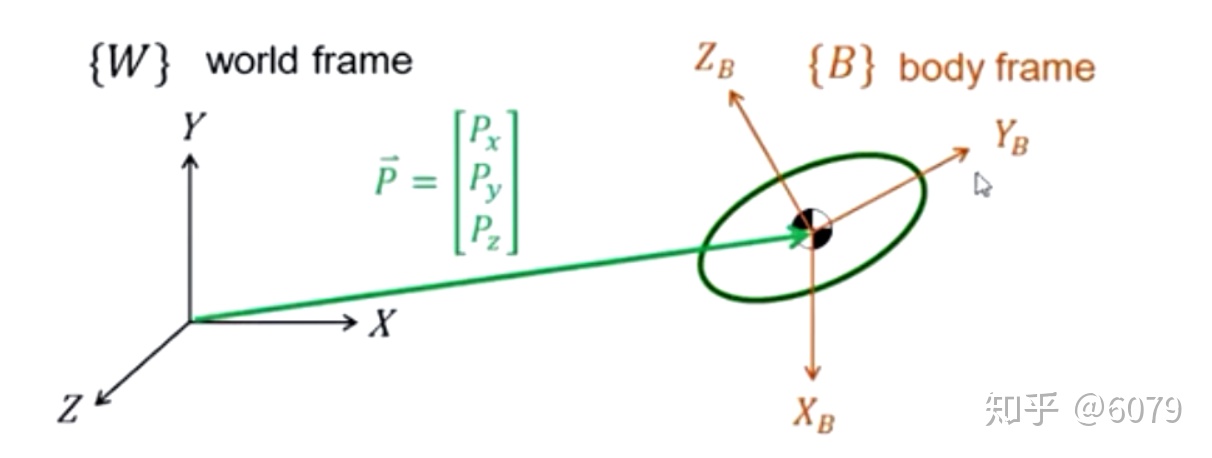
(在这里向量P的三个分量分别是是向量P在frame world的XYZ的投影)
这里的向量只是用来表示空间中的一个点(A position in space),用数学表示为
除了表示一个点外,还可以表示一个方向(这个会在下面的文章介绍,请继续关注)
注:文章写的哪有不对的地方,请大家留言,一起讨论。

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)