pitch、yaw、roll三个角的区别(yaw angle 偏航角,steering angle 航向角的解释)
Z轴正方向为前进方向pitch():俯仰,将物体绕X轴旋转(localRotationX)yaw():航向,将物体绕Y轴旋转(localRotationY)roll():横滚,将物体绕Z轴旋转(localRotationZ)
·
本文章参考https://blog.csdn.net/a812073479/article/details/100103442
以下分析以此坐标系为标准:

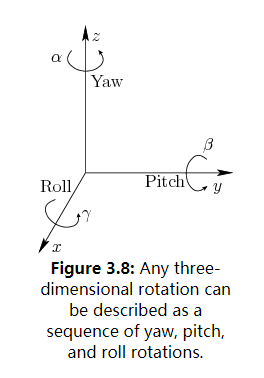
Z轴正方向为前进方向
pitch():俯仰,将物体绕X轴旋转(localRotationX)

yaw():航向,将物体绕Y轴旋转(localRotationY)

roll():横滚,将物体绕Z轴旋转(localRotationZ)

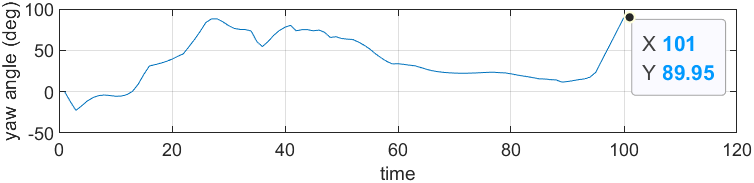
yaw angle 偏航角
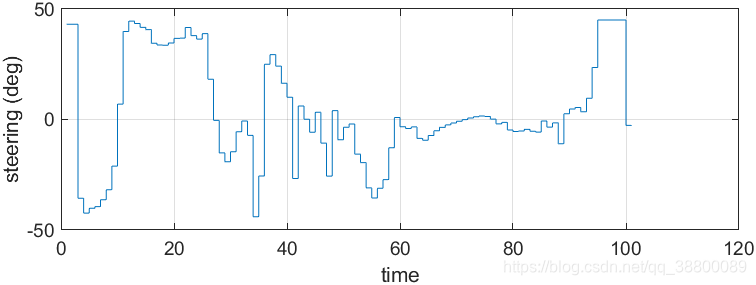
steering angle 航向角:下一个时刻要转的角度=w * Ts
例如:用MPC自动停车导航的例子(2020aMATLAB中Parking Valet Using Nonlinear Model Predictive Control)
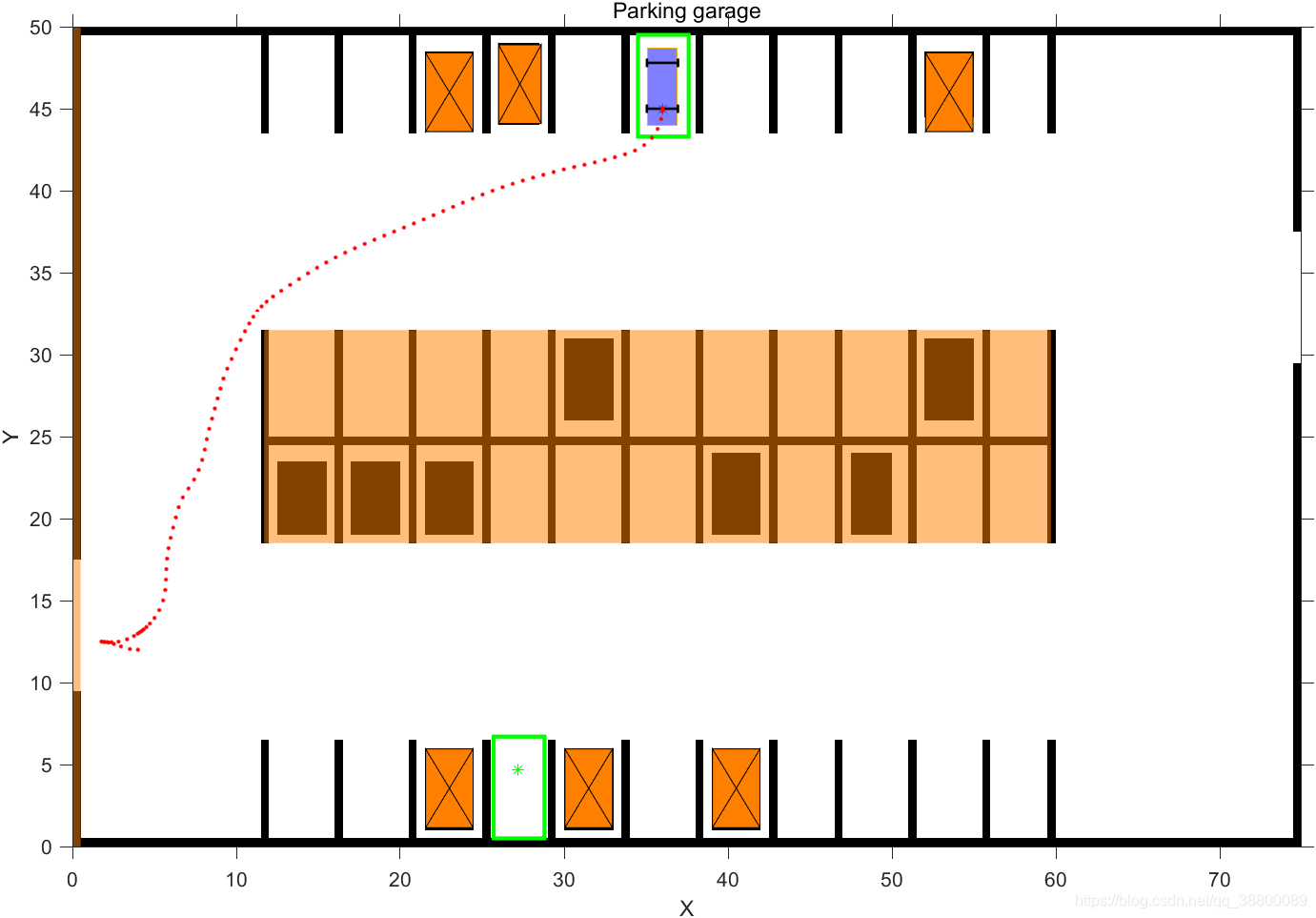
初始位置yaw angle=0,到目标位置yaw angle=90的一个仿真过程
当到达目标位置的时候:steering angle=0
欢迎加入西安开发者社区!我们致力于为西安地区的开发者提供学习、合作和成长的机会。参与我们的活动,与专家分享最新技术趋势,解决挑战,探索创新。加入我们,共同打造技术社区!
更多推荐



 185
185 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)