
orbslam3编译加ros运行
1.准备环境c++11,opencv3以上Pangolin,eigen3.1以上和python2.7,这些一般跑slam系统都会安装的常见包就不说了,dbow2和g2o是git clone下来的三方包自带的。说一下可能会出的问题是编译三方包的g2o时可能回报引用找不到<Eigen/Core>等找不到eigen相关文件的错,这里原因是ubuntu16.04安装eigen时一般是装在/us
1.准备环境
c++11,
opencv3以上
Pangolin,
eigen3.1以上
和python2.7,这些一般跑slam系统都会安装的常见包就不说了,
dbow2和g2o是git clone下来的三方包自带的。
说一下可能会出的问题是编译三方包的g2o时可能回报引用找不到<Eigen/Core>等找不到eigen相关文件的错,这里原因是ubuntu16.04安装eigen时一般是装在/usr/include/eigen3/Eigen中,所以一般我们使用eigen3文件引用都是写的<eigen3/Eigen/Core>,三方包g20默认eigen安装在/usr/include/Eigen中,所以它写的是<Eigen/Core>。
所以出现类似报错可以做的,一个是在/usr/include/Eigen建立与/usr/include/eigen3/Eigen的软链接,但是我不推荐,
还有一个就是直接在三方包的g2o所有引用<Eigen/XXX>文件的地方换成<eigen3/Eigen/XXX>,使用全部替换的时候要注意其中一个se3mat.h文件用的就是<eigen3/Eigen/XXX>,(这个操作有点神奇)。
之后就是git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git,
然后cd ORB_SLAM3目录下,chmod +x build.sh改sh文件权限
然后直接./build.sh执行编译,ok,这样可以执行非ros环境下的数据集读取
2.ros环境下的vislam模块使用
首先根据配置文件EuRoc.yaml和TUM_512.yaml仿写自己的相机和imu的配置文件,编写完后比如放到ORB_SLAM3目录下的test.yaml, 主要注意相机模型只有两种PinHole和KannalaBrandt8(opencv鱼眼模型)可选,然后和orbslam2_ros一样,新开终端
sudo gedit ~/.bashrc
然后在里面加入ORBSLAM3的ros环境export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/XXX/ORB_SLAM3/Examples/ROS
XXX是对应自己下载的orbslam3目录
保存后source ~/.bashrc
echo $ROS_PACKAGE_PATH
检查是否导入环境成功。
成功后。打开ORBSLAM3/Examples/ROS下的CMakelists.txt文件。他这里直接copy的orbslam2的ros程序,没有写完,得改改。
首先在其中find_package部分加上ros相关模块。
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
geometry_msgs
nav_msgs
tf
cv_bridge
)
然后把include_directories换成以下这个
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/../../../
${PROJECT_SOURCE_DIR}/../../../include/CameraModels/
${PROJECT_SOURCE_DIR}/../../../include
${Pangolin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
${catkin_INCLUDE_DIRS}
)
然后把下面它自带的rosbuild_add_executable和连接的全部注释编写我们自己ros节点程序。我这里程序叫ros_vi.cc
# Node for Mono imu camera
rosbuild_add_executable(MonoVi src/ros_vi.cc)
target_link_libraries(MonoVi ${LIBS})
# # Node for monocular camera
# rosbuild_add_executable(Mono
# src/ros_mono.cc
# )
# target_link_libraries(Mono
# ${LIBS}
# )
# Node for monocular camera (Augmented Reality Demo)
# rosbuild_add_executable(MonoAR
# src/AR/ros_mono_ar.cc
# src/AR/ViewerAR.h
# src/AR/ViewerAR.cc
# )
# target_link_libraries(MonoAR
# ${LIBS}
# )
# # Node for stereo camera
# rosbuild_add_executable(Stereo
# src/ros_stereo.cc
# )
# target_link_libraries(Stereo
# ${LIBS}
# )
# # Node for RGB-D camera
# rosbuild_add_executable(RGBD
# src/ros_rgbd.cc
# )
# target_link_libraries(RGBD
# ${LIBS}
# )
之后在ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/编写我们自己的节点程序,我这就是ros_vi.cc;
程序可以直接照搬我这个
#include<iostream>
#include<algorithm>
#include<fstream>
#include<chrono>
#include<ros/ros.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/Imu.h>
#include <queue>
#include <mutex>
#include <condition_variable>
#include<opencv2/core/core.hpp>
#include"../../../include/System.h"
#include "../../../include/ImuTypes.h"
using namespace std;
std::mutex m_buf;
std::mutex pic_buf;
std::condition_variable con;
queue<ORB_SLAM3::IMU::Point> imu_buf;
queue<pair<cv::Mat,double>> images_buf;
class RosdataProcess
{
public:
RosdataProcess(ORB_SLAM3::System* pSLAM):mpSLAM(pSLAM){
std::cout<<"start slam!!!!!!!!"<<std::endl;
}
void GrabImage(const sensor_msgs::ImageConstPtr& msg);
void GrabImu(const sensor_msgs::Imu::ConstPtr& imu_msg);
std::vector<std::pair<std::pair<cv::Mat,double>,std::vector<ORB_SLAM3::IMU::Point>>> gettotalMeasurements();
void processData();
ORB_SLAM3::System* mpSLAM;
double last_imu_t = 0;
double last_img_t = 0;
};
int main(int argc, char **argv)
{
ros::init(argc, argv, "Mono");
ros::start();
if(argc != 3)
{
cerr << endl << "Usage: rosrun ORB_SLAM3 Mono path_to_vocabulary path_to_settings" << endl;
ros::shutdown();
return 1;
}
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM3::System SLAM(argv[1],argv[2],ORB_SLAM3::System::IMU_MONOCULAR,true);
RosdataProcess igb(&SLAM);
ros::NodeHandle nodeHandler;
ros::Subscriber sub = nodeHandler.subscribe("/camera/fisheye1/image_raw", 2000, &RosdataProcess::GrabImage,&igb);
ros::Subscriber subimu = nodeHandler.subscribe("/camera/imu", 2000, &RosdataProcess::GrabImu,&igb);
std::thread tracking_thread = std::thread(std::bind(&RosdataProcess::processData,igb));
ros::spin();
// Stop all threads
SLAM.Shutdown();
// Save camera trajectory
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
ros::shutdown();
return 0;
}
void RosdataProcess::GrabImage(const sensor_msgs::ImageConstPtr& msg)
{
// Copy the ros image message to cv::Mat.
//std::cout<<"get image"<<std::endl;
cv_bridge::CvImageConstPtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvShare(msg);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
if (msg->header.stamp.toSec() <= last_img_t)
{
ROS_WARN("image message in disorder!");
return;
}
last_img_t = msg->header.stamp.toSec();
cv_bridge::CvImagePtr ptr = cv_bridge::toCvCopy(msg);
cv::Mat image = ptr->image.clone();
cv::Mat pro_image;
int camera_num = 0;
if(image.channels()==3){
cv::cvtColor(image,pro_image,cv::COLOR_RGB2GRAY);
}
else{
pro_image = image.clone();
}
pic_buf.lock();
images_buf.push(std::make_pair(pro_image,last_img_t));
//std::cout<<"images_buf size:"<<images_buf.size()<<std::endl;
pic_buf.unlock();
con.notify_one();
}
void RosdataProcess::GrabImu(const sensor_msgs::Imu::ConstPtr& imu_msg)
{
//std::cout<<"get imu"<<std::endl;
if (imu_msg->header.stamp.toSec() <= last_imu_t)
{
ROS_WARN("imu message in disorder!");
return;
}
last_imu_t = imu_msg->header.stamp.toSec();
float data[6];
data[0] = (float)imu_msg->linear_acceleration.x;
data[1] = (float)imu_msg->linear_acceleration.y;
data[2] = (float)imu_msg->linear_acceleration.z;
data[3] = (float)imu_msg->angular_velocity.x;
data[4] = (float)imu_msg->angular_velocity.y;
data[5] = (float)imu_msg->angular_velocity.z;
m_buf.lock();
imu_buf.push(ORB_SLAM3::IMU::Point(data[0],data[1],data[2],data[3],data[4],data[5],last_imu_t));
//std::cout<<"imu buf size:"<<imu_buf.size()<<std::endl;
m_buf.unlock();
con.notify_one();
last_imu_t = imu_msg->header.stamp.toSec();
}
std::vector<std::pair<std::pair<cv::Mat,double>,std::vector<ORB_SLAM3::IMU::Point>>>
RosdataProcess::gettotalMeasurements(){
std::vector<std::pair<std::pair<cv::Mat,double>,std::vector<ORB_SLAM3::IMU::Point>>> measurements;
//std::cout<<"同步处理"<<std::endl;
while (true)
{
if (imu_buf.empty() || images_buf.empty()){
return measurements;
}
if (!(imu_buf.back().t > images_buf.front().second))
{
std::cout<<"wait for imu, only should happen at the beginning"<<std::endl;
return measurements;
}
if (!(imu_buf.front().t < images_buf.front().second))
{
std::cout<<"throw image"<<std::endl;
images_buf.pop();
continue;
}
std::pair<cv::Mat,double> imagedata = images_buf.front();
images_buf.pop();
std::vector<ORB_SLAM3::IMU::Point> IMUs;
while (imu_buf.front().t < imagedata.second)
{
IMUs.emplace_back(imu_buf.front());
imu_buf.pop();
}
IMUs.emplace_back(imu_buf.front());
if (IMUs.empty())
ROS_WARN("no imu between two image");
std::pair<std::pair<cv::Mat,double>,std::vector<ORB_SLAM3::IMU::Point>> data;
data.first = imagedata;
data.second = IMUs;
measurements.emplace_back(data);
}
return measurements;
}
void RosdataProcess::processData(){
while (true)
{
std::vector<std::pair<std::pair<cv::Mat,double>,std::vector<ORB_SLAM3::IMU::Point>>> datas;
std::unique_lock<std::mutex> lk(m_buf);
//得到每张图片对应的多个imu和轮式里程计数据
con.wait(lk, [&]
{
return (datas = gettotalMeasurements()).size() != 0;
});
lk.unlock(); // 从缓存队列中读取数据完成,解锁
for(auto &data:datas){
double imagetime = data.first.second;
ORB_SLAM3::IMU::Point last_imu = data.second[data.second.size()-2];
ORB_SLAM3::IMU::Point fin_imu = data.second[data.second.size()-1];
float imudata[6];
//这里是改成和vins一样每帧图像数据对应的多个imu数据加多一个插值到图像时间上的imu数据
double dt_1 = imagetime - last_imu.t;
double dt_2 = fin_imu.t - imagetime;
double w1 = dt_2 / (dt_1 + dt_2);
double w2 = dt_1 / (dt_1 + dt_2);
imudata[0] = (float)w1 * last_imu.a.x + (float)w2 * fin_imu.a.x;
imudata[1] = (float)w1 * last_imu.a.y + (float)w2 * fin_imu.a.y;
imudata[2] = (float)w1 * last_imu.a.z + (float)w2 * fin_imu.a.z;
imudata[3] = (float)w1 * last_imu.w.x + (float)w2 * fin_imu.w.x;
imudata[4] = (float)w1 * last_imu.w.y + (float)w2 * fin_imu.w.y;
imudata[5] = (float)w1 * last_imu.w.z + (float)w2 * fin_imu.w.z;
data.second[data.second.size()-1] = ORB_SLAM3::IMU::Point(imudata[0],imudata[1],imudata[2],
imudata[3],imudata[4],imudata[5],imagetime);
mpSLAM->TrackMonocular(data.first.first,data.first.second,data.second); // TODO change to monocular_inertial
}
}
}
这里直接把vins的imu与相机同步程序拿来用了,大家使用时记得把程序这里的相机话题和imu话题换成自己的,写好程序之后回到ORB_SLAM3目录下,chmod +x build_ros.sh,然后执行这个脚本文件就能编译成功,使用方式是调用/home/XXX/ORB_SLAM3/Examples/ROS/ORB_SLAM3/目录下生成的之前在cmake中写的可执行文件,我这是/home/XXX/ORB_SLAM3/Examples/ROS/ORB_SLAM3/MonoVi文件。使用方式是
./执行文件 词袋库文件 配置文件
./home/XXX/ORB_SLAM3/Examples/ROS/ORB_SLAM3/MonoVi /home/XXX/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/XXX/ORB_SLAM3/test.yaml
等程序加载完词袋库就可以播放数据集。
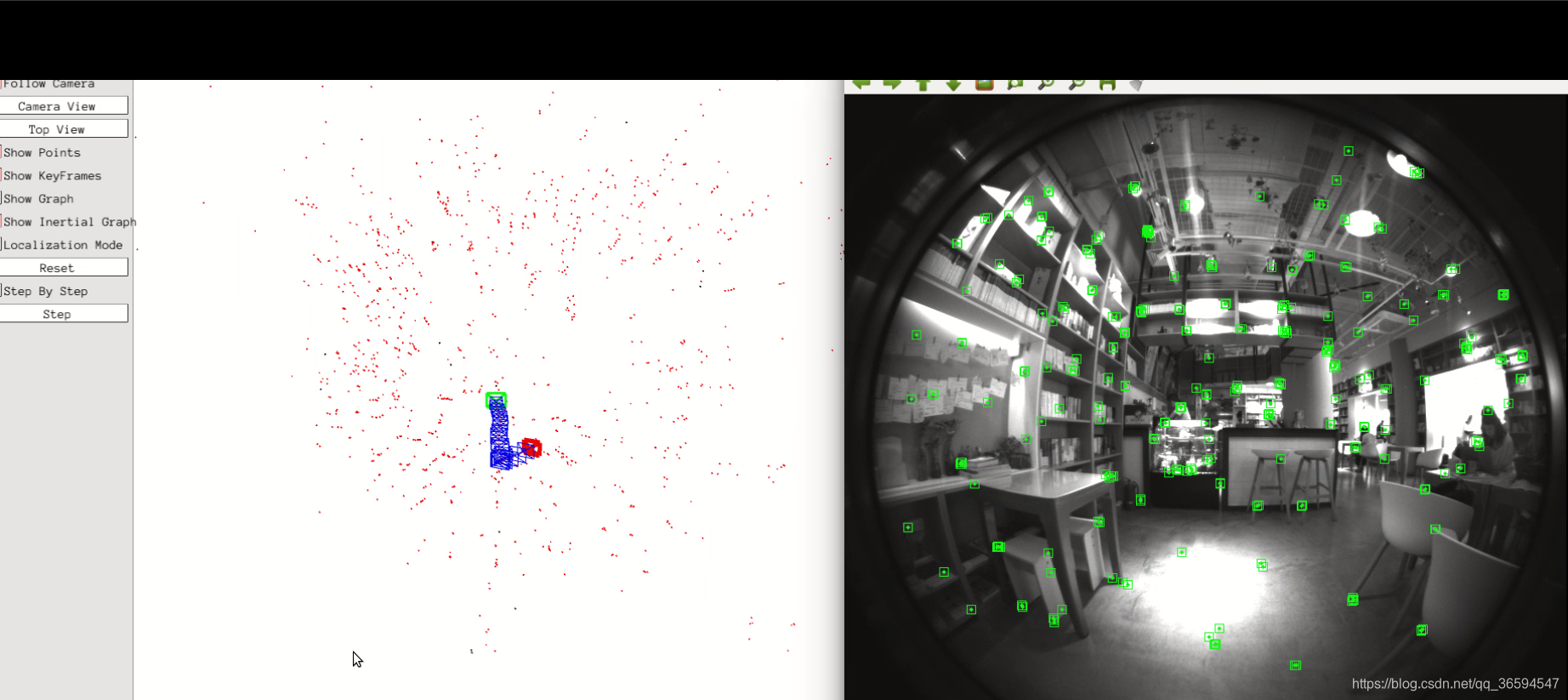
成果

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)