机器人学习笔记(3) 正运动学和逆运动学
2019/10/24正运动学:给定机器人关节变量的取值来确定末端执行器的位置和姿态。逆运动学:根据给定的末端执行器的位置和姿态来确定机器人关节变量的取值。3.1 运动链转动关节对应转角(一个自由度)平动关节对应线性位移(一个自由度)球窝关节(两个自由度)、球形腕关节(三个自由度)。现假设每个关节仅有一个自由度的假设下,关节的运动可以通过单个实数来描述;关节按照1到n的顺序进行编号...
2019/10/24
正运动学:给定机器人关节变量的取值来确定末端执行器的位置和姿态。
逆运动学:根据给定的末端执行器的位置和姿态来确定机器人关节变量的取值。
3.1 运动链
转动关节对应转角(一个自由度)平动关节对应线性位移(一个自由度)球窝关节(两个自由度)、球形腕关节(三个自由度)。
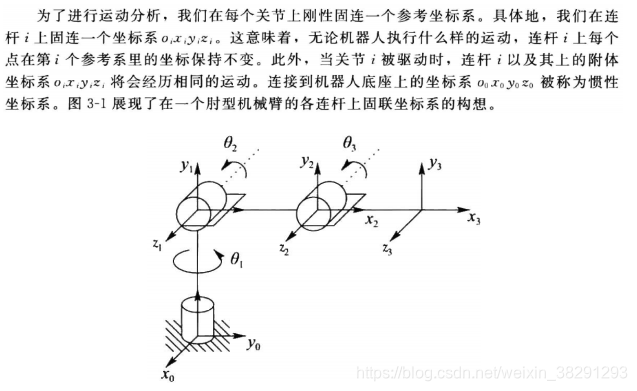
现假设每个关节仅有一个自由度的假设下,关节的运动可以通过单个实数来描述;关节按照1到n的顺序进行编号,杆按照从0到n的顺序进行编号。按照这种约定,关节i把连杆i连接到 i-1杆上。关节i的位置相对于连杆i-1固定,即单关节i被驱动时,连杆i发生运动,因此,连杆0是固定的(基座)。
第i个关节关联一个相应的关节变量,用qi来表示:

2019/10/25
假设Ai是齐次变换矩阵,它给出了坐标系0ixiyizi相对于参考系oi-1xi-1yi-1zi-1的位置和姿态角度。矩阵Ai并非是恒定不变的,它随着机器人位形的改变而改变。基于前面假设一个关节一个自由度的前提下,Ai只是单个变量(qi)的函数。
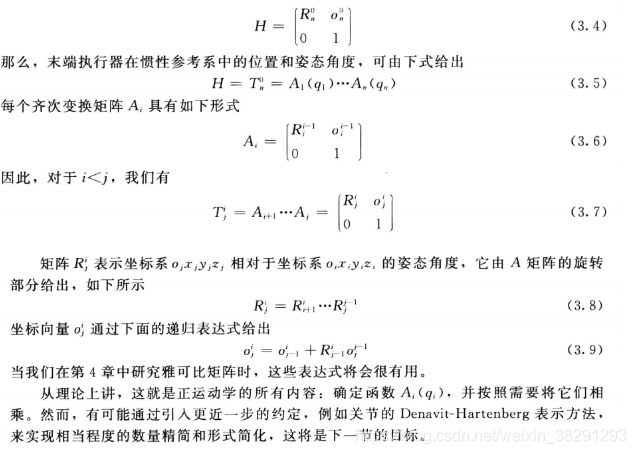
用来表达坐标系ojxjyjzj相对于参考系oixiyizi的位置和姿态的齐次变换矩阵称为变换矩阵,表示如下:

对于末端执行器而言,末端执行器上的任意一点,它在坐标系n中的位置和姿态,我们分别使用一个三维向量和一个3x3的旋转矩阵来表示,并定义齐次变换矩阵如下:
2019/10/29
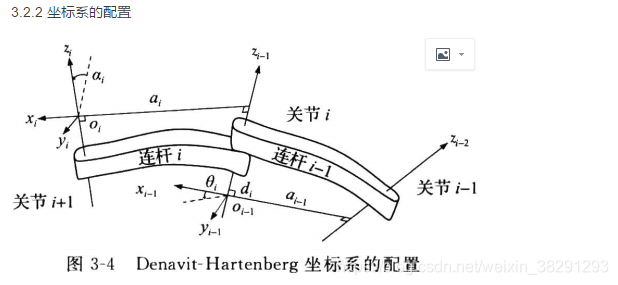
3.2 Denavit-Hartenberg
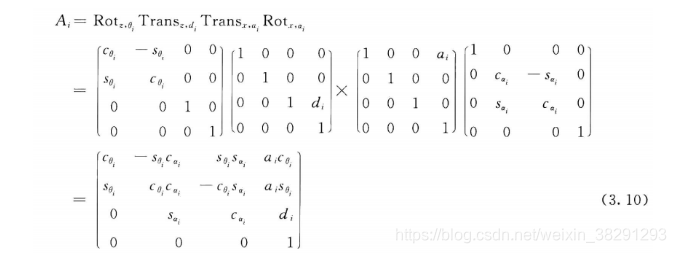
约定在机器人应用中,用来选择参考坐标系的一种常用的约定规则称为Denavit-Hartenberg约定,简称DH约定。一个任意的齐次变换矩阵可以通过6个数字来表示,例如第四列的三个元素以及左上角的3x3旋转矩阵的三个欧拉角。然而在DH表述中只有四个参数甚至更少。原因是坐标系的原点和可以任意的选取。
3.2.1 存在和唯一性问题
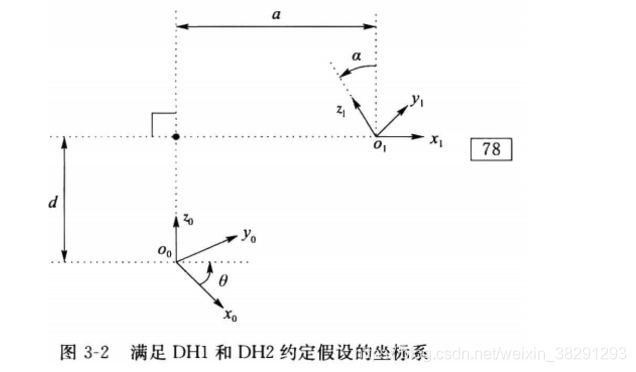
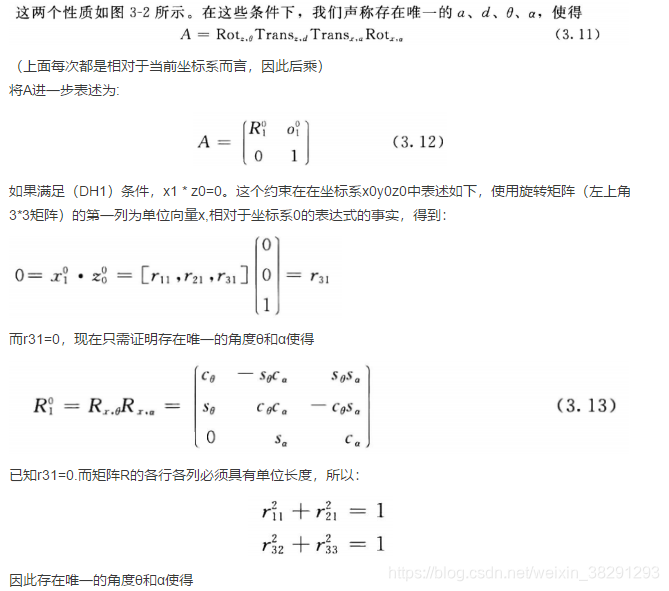
探讨哪些齐次变换可以通过(3-10)的表达式来表述两个附加特性:
(DH1)坐标轴x1垂直于坐标轴z0.。
(DH2)坐标轴x1与坐标轴z0相交。

https://download.csdn.net/download/weixin_38291293/11387880
https://download.csdn.net/download/weixin_38291293/11387874

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 4
4 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)