李群、李代数等机器人学数学概念
Question:设函数T = transl(x,y,z),创建SE3平移变换。H = transl (0.5 0 0) = ? SE3变换的目的是什么?解:三维齐次矩阵,x轴平移0.5。目的:在配置空间用齐次矩阵求解机器人的平移和旋转变换。1、李群与李代数李群SE(3) 是旋转加上位移,也称欧式变换、刚体变换,一般我们用矩阵来表示,其中R为旋转,...
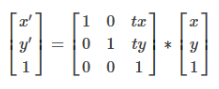
Question:设函数T = transl(x,y,z),创建SE3平移变换。H = transl (0.5 0 0) = ? SE3变换的目的是什么?
解:三维齐次矩阵  ,x轴平移0.5。
,x轴平移0.5。
目的:在配置空间用齐次矩阵求解机器人的平移和旋转变换。
1、李群与李代数
李群SE(3) 是旋转加上位移,也称欧式变换、刚体变换,一般我们用矩阵 来表示,其中R为旋转, t 为位移,所以有6个自由度,3个旋转,3个位置。
来表示,其中R为旋转, t 为位移,所以有6个自由度,3个旋转,3个位置。
2、欧拉角(Euler angles)定义:用来确实定点转动刚体位置的三个角向量
若令Ox'y'z'的原始位置重合于Oxyz,经过相继绕Oz、ON和Oz'的三次转动Z(ψ)、N(θ)、Z'(φ)后,刚体将转到图示的任意位置(见刚体定点转动)。变换关系可写为:
R(ψ,θ,φ)=Z'(φ)N(θ)Z(φ)
应用:在刚体的问题上,xyz坐标系是全局坐标系, XYZ 坐标系是局部坐标系。全局坐标系是不动的;而局部坐标系牢嵌于刚体内。
3、叉乘与点乘
点乘,也叫数量积。结果是一个向量在另一个向量方向上投影的长度,是一个标量。
叉乘,也叫向量积。结果是一个和已有两个向量都垂直的向量。方向的判定采用右手法则。
4、刚体变换(欧式变换)
只有物体的位置(平移变换)和朝向(旋转变换)发生改变,而形状不变,得到的变换称为刚性变换。刚性变换是最一般的变换。
5、齐次坐标系与齐次矩阵
齐次坐标使用N+1维坐标来表示N维坐标,例如在2D笛卡尔坐标系中加上额外变量w来形成2D齐次坐标系(x,y)⇒(x,y,w) 。齐次坐标具有规模不变性,同一点可以被无数个齐次坐标表达.(x,y,1)⇒(ax,ay,a) 齐次坐标转化为笛卡尔坐标可以通过同除最后一项得到。为什么要引入齐次坐标系。简单的理解就是可以使用矩阵同时描述旋转和平移,这样就可以使用矩阵相乘来表述物体的旋转、缩放和平移了。
齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。
参考:https://blog.csdn.net/winbobob/article/details/38829001 齐次坐标(Homogeneous Coordinate)的理解
https://www.cnblogs.com/csyisong/archive/2008/12/09/1351372.html
齐次矩阵可以描述刚体在空间中的位姿,也可以描述位姿变换过程:
(1, 4, 7)'如果写成(1,4,7,0)',它就是个向量;如果是(1,4,7,1)',(2,8,14,2)'它就是一个点。
坐标轴的齐次坐标: (1,0,0,0)' (0,1,0,0)'(0,0,1,0)
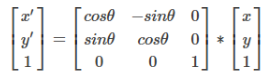
齐次坐标系下刚体变换:(平移、旋转、绕定点旋转:)

6、内积:对任意的 ,实数
,实数 ,称为
,称为
与
 的内积,记作
的内积,记作 .
.
为代数定义,另有几何定义。
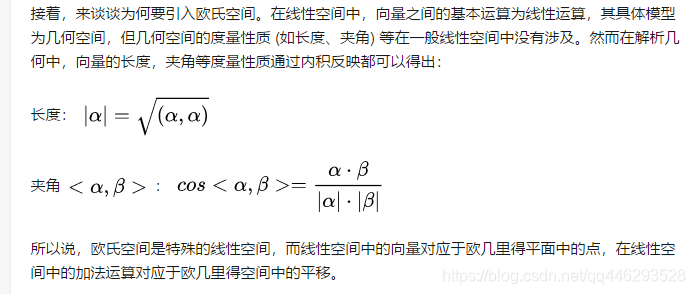
7、欧式空间:在实数域R上,线性空间V(或向量空间)上定义着内积g,则V为g的内积空间或欧式空间。
简而言之,欧氏空间就是具有了内积的线性空间。线性空间引入内积的目的是为了能够计算两点间的距离和夹角。或者说为了线性空间解析和度量。
具体的,参考宮非大佬的解释:https://www.zhihu.com/question/27903807?sort=created
8、非欧空间: 自然界存在着两种基本空间,欧氏空间和非欧空间,欧氏空间有不变的几何中心,是自然界的骨架。非欧空间是“弯曲的”, 非欧空间的面是曲面。
非欧几何,爱因斯坦曾经形象地说明过:假定存在一种二维扁平智能生物,但它们不是生活在绝对的平面上,而是生活在一个球面上,那么,当它们在小范围研究圆周率的时候,会跟我们一样发现圆周率是3.14159……可是,如果它们画一个很大的圆,去测量圆的周长和半径,就会发现周长小于2πr,圆越大,周长比2πr小得越多,为了能够适用于大范围的研究,它们就必须修正它们的几何方法。如果空间有四维,而我们生活在三维空间中,而这个三维空间在空间的第四个维度中发生了弯曲,我们的几何就会象那个球面上的扁平智能生物一样,感受不到第四维的存在,但我们的几何必须进行修正,这就是非欧几何。在非欧几何中,平行的直线只在局部平行,就象地球的经线只在赤道上平行。
闵可夫斯基空间属于欧几里得几何的扩展,它是把时间也作为一个维度进行量化,再添加光速系数,跟洛伦兹变换一样,使得不同惯性系中的运动问题计算得以简化。
9、标准欧式口空间:四维空间被称为标准欧几里得空间,可以拓展到n维。人类作为三维物体可以理解四维时空(三个空间维度和一个时间维度)但无法认识以及存在于四维空间,因为人类属于第三个空间维度生物。通常所说时间是第四维即四维时空下的时间维度。四维空间的第四维指与x,y,z同一性质的空间维度。
10、解析几何:解析几何指借助笛卡尔坐标系(“平面直角坐标系”或“ 空间直角坐标系”),用解析式来研究几何对象之间的关系和性质。
解析几何包括平面解析几何和立体解析几何两部分。解析几何的建立第一次真正实现了几何方法与代数方法的结合,是数学发展史上的一次重大突破。在平面解析几何中,除了研究直线的有关性质外,主要是研究圆锥曲线(圆、椭圆、抛物线、双曲线)的有关性质。在空间解析几何中,除了研究平面、直线有关性质外,主要研究柱面、锥面、旋转曲面。
11、笛卡尔坐标系(直角坐标系):笛卡尔坐标系是欧氏空间坐标系的一种具体实现形式。
12、构筑空间(配置空间,关节空间(近似)):
参考文章:https://www.zhihu.com/question/60108896/answer/224251293
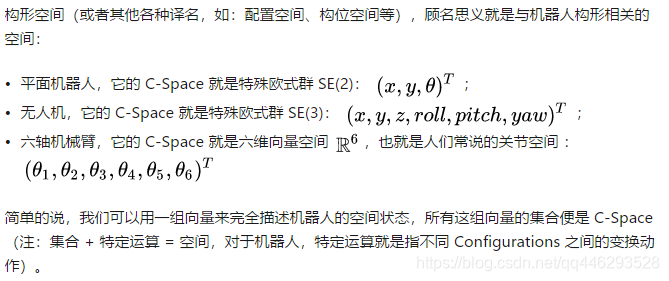
配置空间一般指运动机构输出的位置量。例如机械臂,配置空间就是所有关节角度位置的空间。一个机械臂有两个关节,那配置空间就是二维的线性空间,即 。每一个维度表示一个关节所处的位置。与配置空间对应的是工作空间(笛卡尔空间),即机器人所处的三维空间。
。每一个维度表示一个关节所处的位置。与配置空间对应的是工作空间(笛卡尔空间),即机器人所处的三维空间。
在配置空间做轨迹规划的优点:
第一、求机器人的运行轨迹,执行机构是在配置空间进行,如控制机械臂运动的方法是直接控制关节电机的角度,而不是直接控制关节的位置。所以在配置空间上规划路线非常方便执行,不需要转换。
第二、很多机构的运动限制是在配置空间描述的,比如关节电机的最大角度、关节电机的最大角速度等,在配置控制进行规划也方便考虑这些限制。
第三、配置空间与工作空间互相转换(正逆运动学)的不对称。正运动学存在解析解且唯一,非常容易计算且计算速度非常快。而逆运动学对于简单的机械臂结构也是很难的问题,不一定存在解(比如你后背上的某些地方你的手抓不到),存在解也不一定为唯一(你抓前面的点有多重手臂姿势可以抓),还存在奇点等情况。求解轨迹是需要同时考虑配置空间和工作空间,所以倾向于在配置空间上进行求解,需要时转换到工作空间,而不是做难度大的多的相反过程。
13、奇异点、关节限制、约束等概念与路径规划
(1)机器臂的运动规划可以分为两个层面:一是笛卡尔空间的路径规划(末端位姿);一是关节空间的运动参数设计(机器人构型)。实际作业中,机器人需要综合考虑碰撞检测、奇异点回避、工作空间限制、轴超限保护等约束条件,更严格的还应考虑运动的平稳性(主要取决于关节速度、加速度)、关节力矩和关节力约束等等。
参考文献:https://www.zhihu.com/question/22292611/answer/120145152 回答者:fq-shine
(2)奇点是机器人逆运动学引起的。奇点时,机器人到达某一位置有无数种解。奇点造成器械臂重启。
参考文献:http://www.360doc.com/content/16/0307/09/1751130_540133919.shtml 三类奇点

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)