- @u011115875
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
今天CAD布局设置为PDF打印,设置成A4图纸,但是图形坐标显示一直是英寸,用bing搜索了半天,也有deepseek搜了一下啊,都没有找到解决办法。后来,发现是比例问题,只要比例设置对了,图形坐标显示才正确。下面是布局的图形坐标显示为mm的设置,关键在于打印比例。这是显示英寸的设置。
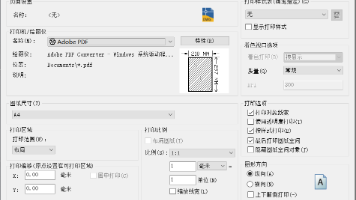
今天CAD布局设置为PDF打印,设置成A4图纸,但是图形坐标显示一直是英寸,用bing搜索了半天,也有deepseek搜了一下啊,都没有找到解决办法。后来,发现是比例问题,只要比例设置对了,图形坐标显示才正确。下面是布局的图形坐标显示为mm的设置,关键在于打印比例。这是显示英寸的设置。
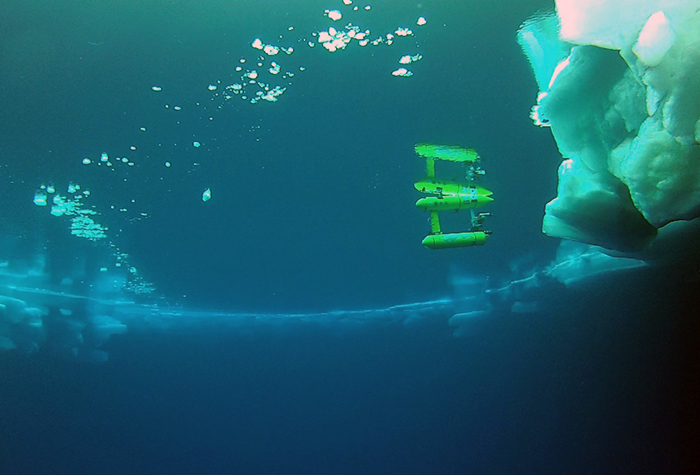
由于20世纪80年代以来人工智能技术、微电子技术和控制技术的迅速进步,国外智能水下机器人科技也取得了蓬勃发展,特别是在许多中国沿海国家的水下机器人技术发展得很快,已经形成了许多世界著名的水下机器人研究机构,如美国伍兹霍尔海洋研究所、加拿大海洋科技中心、日本东京大学水下机器人研究研究室等。大型ROV能加载更多的传感器,下图是海洋探索公司(OceanExploration)的ROV,名字叫深海发现者(
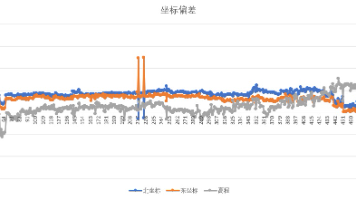
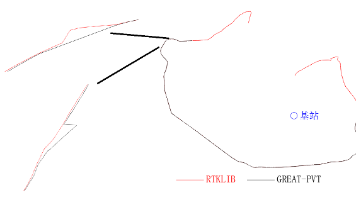
由于GREAT解算过程剔除了一些点,而PRIDE解算没有剔除,所以我们选取了一段同名点,来比较它们的坐标偏差,见下图。解算时间大约20分钟,将解算的结果落在图中,见下图,从图中可以看出,PRIDE宽松浮点解的轨迹最完整,与GREAT和RTKLIB解算的轨迹基本重合。将PRIDE解算结果展布在上文图形中,见下图,图中选中的线段是PRIDE解算结果,从图中可以看出,只有中间一段定位轨迹与RTKLIB2
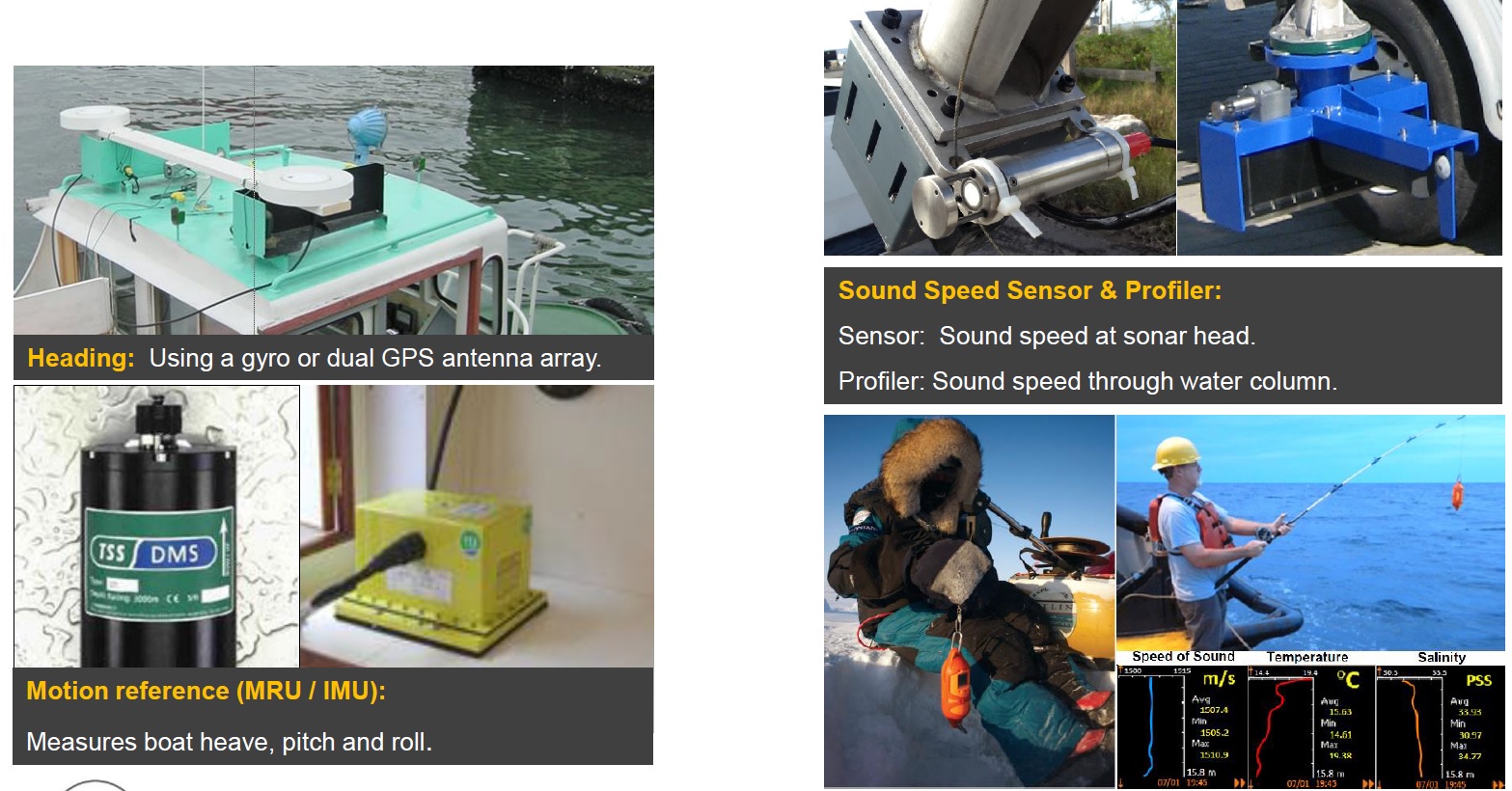
由于数据都是通过时间来关联,采集数据的设备都必须使用相同的时间基准——UTC时间或者PC时间,否则,数据质量不会好;偏移值,位置偏移值相对于船舶坐标原点,Pitch和Roll值为了平衡Pitch和Roll,Heading偏移Yaw值是磁偏角与坐标北的偏差。辅助传感器主要有:罗经(提供航向),姿态传感器(提供横摇、纵摇和艏摇)、表层声速仪(设备处声速)和声速剖面仪。姿态传感器偏移设置,与多波束类似,
LibGREAT库主要用于PPP、RTK滤波解算,包括滤波估计中涉及的数据解码、存储以及PPP、PPP-AR、RTK算法的实现,LibGnut库来源于开源GNSS软件G-nut,包括GNSS数据的解码和存储以及基本参数配置模块。最近又听说了武汉大学GREAT(GNSS+ REsearch, Application and Teaching)团队开源了其基于因子图优化的RTK与RTK/INS代码,很
从平面位置来看,应该是定点观测,TerraPos由于版本没有升级只使用了GPS/GLONASS星历,PRIDE-PPPAR使用了GPS/GLONASS/Galileo/Compass星历。使用PRIDE-PPPAR,rinex观测文件名必须规范,rinex观测文件名格式有两种格式:短格式和长格式。这问题就不好理解了,猜测问题可能出在rinex文件的版本,使用GFZRNX将观测文件的版本转成rine
传统搜索引擎只能根据关键字搜索程序报错的相关内容,仅呈现而无分析,而deepseek能分析程序报错的全部内容,并能给出多种解决方案。开始猜测是字符串传入的问题,用deepseek搜索了字符串传入的方法,按照它给出的方法逐一尝试都不行。里面有1个调试Fortran DLL 场元函数的方法,在Fortran子程序开头添加写文件日志,确认是否进入函数,并打印接收到的参数值(尤其是字符串长度和内容),以判
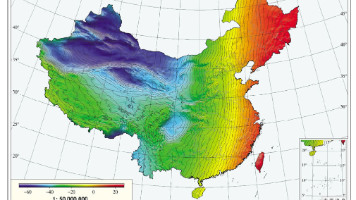
整个求解过程是一个精确的数据融合与复杂的数学优化过程。EGM2008包含了从2阶到2159阶的完整球谐系数,并有部分系数扩展至2190阶-41。后续的评估也表明,这个模型在大多数区域达到了极高的精度,大地水准面高与GPS/水准数据的差异通常在±5至10厘米以内--21。EGM2008模型的球谐系数,不是通过单一公式或简单计算得来的,而是一个“多源数据融合”和“最优化求解”的复杂系统工程-21。它们
简单来说,移去地形质量(直接地形影响)会改变该点的重力值,而将质量重新铺到压缩面上(间接影响)则会改变大地水准面的位置。核心定义:将大地水准面外部的所有地形质量,凝聚(压缩)到一个位于大地水准面之下、具有一定深度(例如 20-30 公里)的面上。根据经典的大地测量学理论,Helmert 凝聚法主要分为两类,也就是 Helmert 第一凝聚法和第二凝聚法。核心定义:将大地水准面外部的所有地形质量,沿