




- @m0_57354496
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
作为开篇,先以MCMTT的全称。
软件/算法层面的通用机器人基础模型 (,指在大规模多源数据上预训练、可适配多种下游任务的大模型),目标是构建"一种模型适配多种机器人"的VLA,视觉-语言-动作模型——将图像感知、语言理解和动作执行统一到一个端到端框架中) 架构傅利叶 GRx: 硬件/平台层面的通用人形机器人系列,为算法验证和部署提供物理载体GR00T N1的核心评估和部署就是在傅利叶GR-1人形机器人上完成的。换言之,算法与硬件

软件/算法层面的通用机器人基础模型 (,指在大规模多源数据上预训练、可适配多种下游任务的大模型),目标是构建"一种模型适配多种机器人"的VLA,视觉-语言-动作模型——将图像感知、语言理解和动作执行统一到一个端到端框架中) 架构傅利叶 GRx: 硬件/平台层面的通用人形机器人系列,为算法验证和部署提供物理载体GR00T N1的核心评估和部署就是在傅利叶GR-1人形机器人上完成的。换言之,算法与硬件
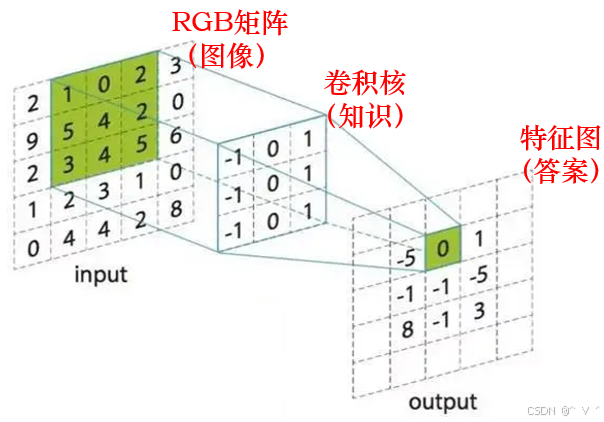
1 起源 origin🚩CNN讲解它来咯!
name: 具身智能与世界模型description: 具身智能和世界模型领域的研究资料目录。
name: 具身智能与世界模型description: 具身智能和世界模型领域的研究资料目录。
1. 项目简介🚩笔记它来咯!

第一步:双击进入Anaconda Prompt(anaconda),也就是anaconda命令行第二步:指定想要的python环境(需要先创建环境)conda activate name原环境base 中提供了足够的包,而自己创建的环境需要自行添加包(可以看到小括号中的环境名称不同)第三步:输入idle并回车可以看到出现了python自带的idle环境:...
1 起源 origin🚩CNN讲解它来咯!
1. MFC新建一个工程1.1 创建一个新项目1.2 选择MFC应用1.3 定义项目名称,项目文件存放路径1.4 完成创建2. 初始工程文件的结构2.1 解决方案资源管理器2.2 类视图2.3 各类之间的继承关系2.4 OnDraw函数3. 自定义坐标系的设置3.1 原因3.2 映射模式的宏定义表3.3 实现4. 画笔画刷的使用4.1 CDC类 , 绘图工具类4.2 绘制像素点4.3 绘图标准步骤
