
写文章




- @Xi_FANS
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
阅读笔记:Safe Coverage of Moving Domains for Vehicles With Second-Order Dynamics
安全性通过HJ可达性理论分析实现(CBF的问题在于存在震荡,对于需要c-cover的情况可能无法满足?)均匀分布通过人工势场(artificial potential)和对准力(alignment force),控制达到期望的车间距和相对速度。创新点在于:提出一种新的控制器,通过分布式控制,无需领导者,实现多智能体系统自发的完成对目标区域的覆盖。并通过HJ可达性保证过程的安全性。Hamilton–
阅读笔记:Sensor-Based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments
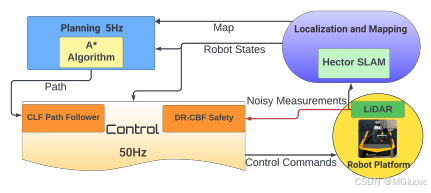
这篇论文是作者前面几个工作的综合,其主要涉及了CBF,CLF,DRO,LiDar,SDF等方面,由于论文很长,所以做一个报告进行记录方便后面查看。本文设计大量证明稳定性和Lipschitzness的内容,这里不做介绍,只介绍论文主要内容当存在状态估计误差(动捕)和雷达测量误差,并且是在未知环境下时,如何保证智能体的实时安全性?论文提出的算法框架为:CLF-DR-CBF,分别用到了CLF保证跟踪的稳
到底了