- @Galen_xia
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
对CIFAR-10数据集进行图像分类。数据集中的图像大小为32x32x3。定义卷积神经网络的结构这里,将定义一个CNN的结构。将包括以下内容:(1)卷积层:可以认为是利用图像的多个滤波器(经常被称为卷积操作)进行滤波,得到图像的特征。(2)通常,我们在 PyTorch 中使用 nn.Conv2d 定义卷积层,并指定以下参数:nn.Conv2d(in_channels, out_channels,
1.1为什么是ML策略?(Why ML Strategy?)如何构建你的机器学习项目也就是说机器学习的策略。如何更快速高效地优化你的机器学习系统。那么,什么是机器学习策略呢?[外链图片转存失败,源站可能有防盗]https://!链机制,建议将(imbo4K5log.csdnimg.cn/219122v940O72967.jpg?x-oprocess=image/watermark1(ttps...
摘要:近端策略优化(PPO)算法详解 PPO算法是强化学习领域的重要突破,解决了传统策略梯度方法在更新步长敏感性和数据利用率上的局限。基于马尔可夫决策过程框架,PPO通过引入裁剪机制和优势函数估计,在保持训练稳定性的同时简化了计算。核心公式L^CLIP(θ)采用概率比率裁剪技术,将策略更新幅度限制在[1-ε,1+ε]范围内,有效平衡了探索与利用。PPO结合广义优势估计(GAE)和熵正则化项,既保证
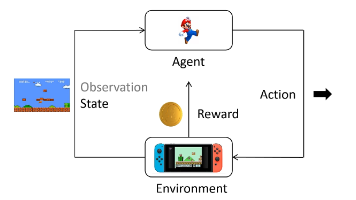
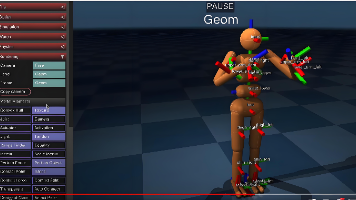
机器人仿真与强化学习:虚拟环境训练智能体的关键技术 摘要:机器人仿真技术为强化学习提供了安全高效的训练平台,通过精确模拟物理环境和交互过程,使智能体能在虚拟世界中积累经验。文章系统阐述了观测空间与奖励函数的设计原则,对比分析了PPO、SAC等主流强化学习算法的适用场景,并以机械臂抓取任务为例展示了完整实现流程。仿真环境的数据生成优势在于无限次重置、安全模拟危险场景和低成本测试极端条件。通过域随机化
基于Dlib库的人脸检测模型训练官方参考链接:https://github.com/davisking/dlib/blob/master/python_examples/train_object_detector.py准备数据集:准备中训练:import osimport dlib# options用于设置训练的参数和模式options = dlib.simple_object...
摘要:近端策略优化(PPO)算法详解 PPO算法是强化学习领域的重要突破,解决了传统策略梯度方法在更新步长敏感性和数据利用率上的局限。基于马尔可夫决策过程框架,PPO通过引入裁剪机制和优势函数估计,在保持训练稳定性的同时简化了计算。核心公式L^CLIP(θ)采用概率比率裁剪技术,将策略更新幅度限制在[1-ε,1+ε]范围内,有效平衡了探索与利用。PPO结合广义优势估计(GAE)和熵正则化项,既保证
1.迁移VGG16下面看看迁移学习的具体实施过程,首先需要下载已经具备最优参数的模型,这需要对我们之前使用的model = Models()代码部分进行替 换,因为我们不需要再自己搭建和定义训练的模型了,而是通过代码自 动下载模型并直接调用,具体代码如下:from torchvision import modelsmodel = models.vgg16(pretrained=True)print
摘要:近端策略优化(PPO)算法详解 PPO算法是强化学习领域的重要突破,解决了传统策略梯度方法在更新步长敏感性和数据利用率上的局限。基于马尔可夫决策过程框架,PPO通过引入裁剪机制和优势函数估计,在保持训练稳定性的同时简化了计算。核心公式L^CLIP(θ)采用概率比率裁剪技术,将策略更新幅度限制在[1-ε,1+ε]范围内,有效平衡了探索与利用。PPO结合广义优势估计(GAE)和熵正则化项,既保证
1 原理任何一副灰度图像都可以被看成拓扑平面,灰度值高的区域可以被看成是山峰,灰度值低的区域可以被看成是山谷。我们向每一个山谷中灌不同颜色的水。随着水的位的升高,不同山谷的水就会相遇汇合,为了防止不同山谷的水汇合,我们需要在水汇合的地方构建起堤坝。不停的灌水,不停的构建堤坝直到所有的山峰都被水淹没。我们构建好的堤坝就是对图像的分割。这就是分水岭算法的背后思想。但是这种方法通常都会得到过度分割的结果
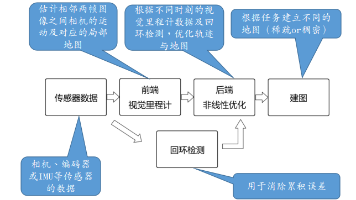
在自动驾驶、机器人导航、AR/VR等领域,实时精准的定位与建图是核心挑战。2020年,由西班牙巴塞罗那自治大学(UAB)研发的ORB-SLAM3横空出世,彻底改变了视觉SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)的技术格局。作为ORB-SLAM系列的第三代作品,它首次实现了单目、双目、RGB-D与IMU的深度融合,并创新性地引入Atla