
写文章




- @2302_79707928
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
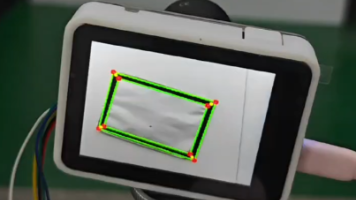
用opencv和caixcam进行矩形框识别中点坐标输出,以及激光识别和激光坐标输出。#电赛E题
在嵌入式系统(如 MaixCAM)中,如何高效地识别图像中的特征,并将这些数据实时传输到主控板或机器人控制器,是实际应用中最关键的一环。本文将通过一个的完整案例,解析背后的原理与实现方法。适用场景如:棋盘识别(三子棋、定位标靶等)激光点跟踪系统机器人对位视觉引导人机交互识别与图像辅助控制。
用opencv和caixcam进行矩形框识别中点坐标输出,以及激光识别和激光坐标输出。#电赛E题
在嵌入式系统(如 MaixCAM)中,如何高效地识别图像中的特征,并将这些数据实时传输到主控板或机器人控制器,是实际应用中最关键的一环。本文将通过一个的完整案例,解析背后的原理与实现方法。适用场景如:棋盘识别(三子棋、定位标靶等)激光点跟踪系统机器人对位视觉引导人机交互识别与图像辅助控制。
用opencv和caixcam进行矩形框识别中点坐标输出,以及激光识别和激光坐标输出。#电赛E题
在嵌入式系统(如 MaixCAM)中,如何高效地识别图像中的特征,并将这些数据实时传输到主控板或机器人控制器,是实际应用中最关键的一环。本文将通过一个的完整案例,解析背后的原理与实现方法。适用场景如:棋盘识别(三子棋、定位标靶等)激光点跟踪系统机器人对位视觉引导人机交互识别与图像辅助控制。
用opencv和caixcam进行矩形框识别中点坐标输出,以及激光识别和激光坐标输出。#电赛E题
在嵌入式系统(如 MaixCAM)中,如何高效地识别图像中的特征,并将这些数据实时传输到主控板或机器人控制器,是实际应用中最关键的一环。本文将通过一个的完整案例,解析背后的原理与实现方法。适用场景如:棋盘识别(三子棋、定位标靶等)激光点跟踪系统机器人对位视觉引导人机交互识别与图像辅助控制。
到底了