
写文章




- @2301_77881132
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
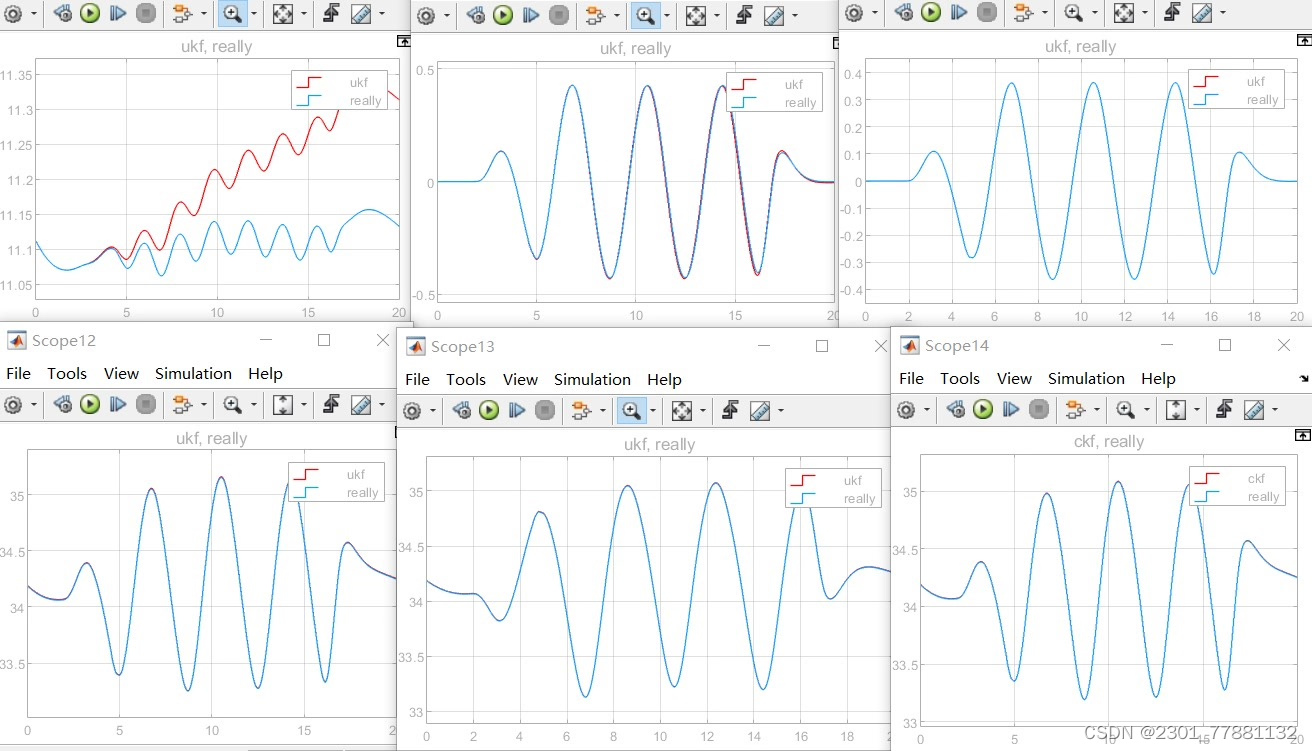
基于分布式驱动电动汽车的车辆状态估计,采用的是无迹卡尔曼(ukf)观测器
模型中第一个模块是四轮驱动电机;第二个模块是carsim输出的真实参数,包括汽车所受横向力,纵向力,驱动力矩等:第三个模块是基于dugoff计算轮胎力模块,该模块可以计算纵向力和横向力。基于分布式驱动电动汽车的车辆状态估计,采用的是无迹卡尔曼(ukf)观测器,可估计包括纵向速度,质心侧偏角,横摆角速度,以及四个车轮角速度七个状态。第四个模块是关于ukf的车辆状态估计,可估计包括纵向速度,横摆角速度
到底了