
使用旧版本MATLAB打开新版本MATLAB创建的.slx文件 & 提高MATLAB启动速度
当我们使用低版本的matlab打开较新版本的matlab所创建的.slx文件时常常会报出如上图所示的错误。下面以matlab2019b为例,在短时间内解决这一问题:第一步:打开MATLAB,点击上方工具栏中“预设”按钮第二步:在弹出界面左侧菜单中点击simulink,接着点击其中的“Open Simulink Preference”按钮第三步: 在弹出的“Simulink Preference”界
·
👨🏫🥰🥳需要机械臂相关资源的同学可以在评论区中留言哦🤖😽🦄
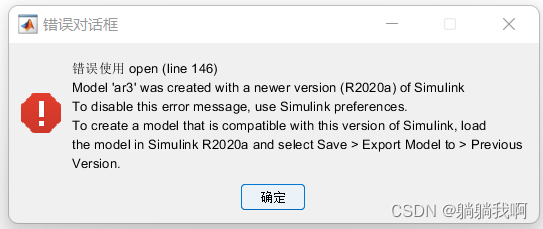
当我们使用低版本的matlab打开较新版本的matlab所创建的.slx文件时常常会报出如上图所示的错误。下面以matlab2019b为例,在短时间内解决这一问题:
第一步:打开MATLAB,点击上方工具栏中“预设”按钮

第二步:在弹出界面左侧菜单中点击simulink,接着点击其中的“Open Simulink Preference”按钮

第三步: 在弹出的“Simulink Preference”界面中,首先点击左侧菜单中“Model File”,接着将选项“Do not load models created with a newer version of Simulink”取消选中(如图所示),最后点击右下角的Apply完成配置
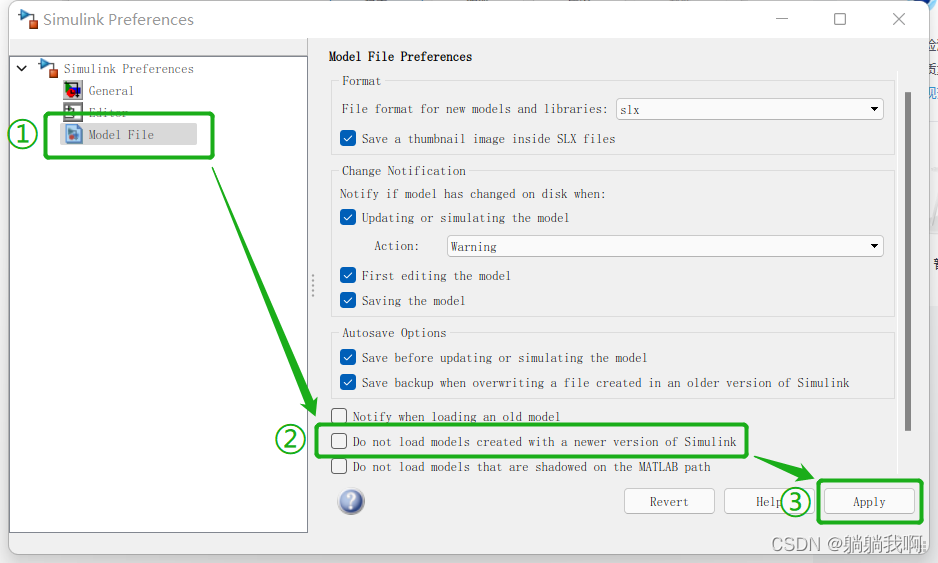
此时,MATLAB就可以正常运行之前报错的.slx文件了
同时,许多人可能在启动MATLAB时需要花费很长很长的时间,甚至只出现一下MATLAB的图标就渺无音信了。要解决这个问题,仅需要将licenses文件夹的路径加入MATLAB的快捷方式中就可以了,如下所示:
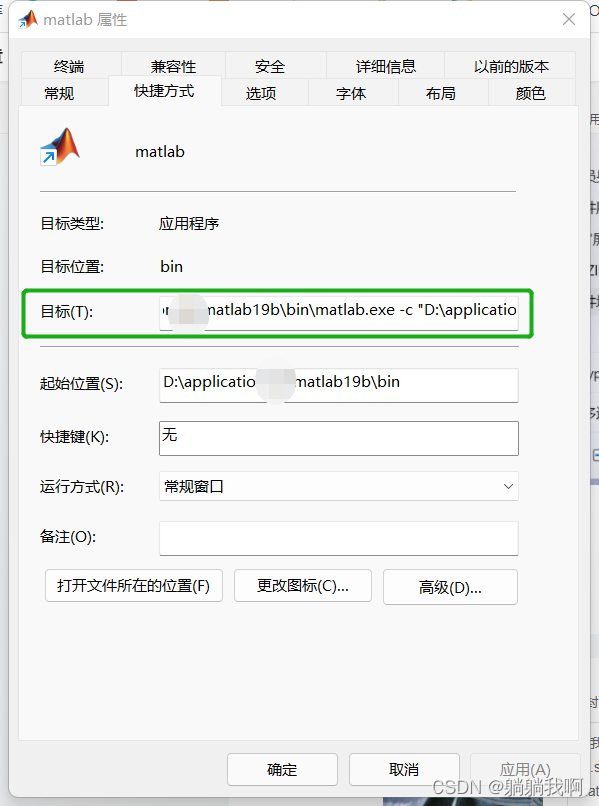
第一步:右键点击MATLAB快捷方式,查看属性
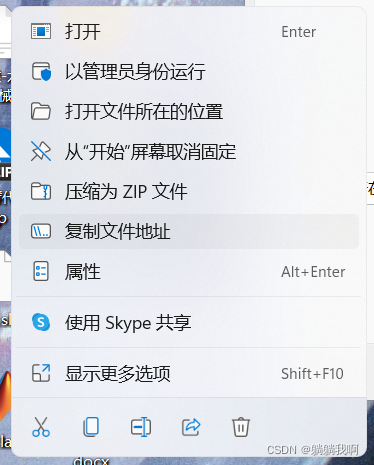
第二步:将目标中内容改为:
“你的matlab.exe路径 -c 你MATLAB对应的licenses文件夹路径”
以我的为例,其中应该为:
D:\application\matlab19b\bin\matlab.exe -c "D:\application\matlab19b\licenses"
注意:-c 两侧均有一个空格!!!
此后,MATLAB便可正常、快速的启动了。
附r2019b资源:https删除://pan.bai删除du.com/s/1Y-wfllxzvYp_Es87删除dUN5DA?pwd=1234 提取码:1234

指南目录📖:
长江两岸老火锅,共聚山城开发者!We Want You!
更多推荐
 22
22 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)