- @m0_49968063
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本篇主要介绍一下内容:什么是嵌入式系统?什么是时间触发系统?还有哪些其他的系统结构?为什么大家认为时间触发系统比其他结构的系统更可靠?什么是软件模式?怎样创建可靠的嵌入式系统?
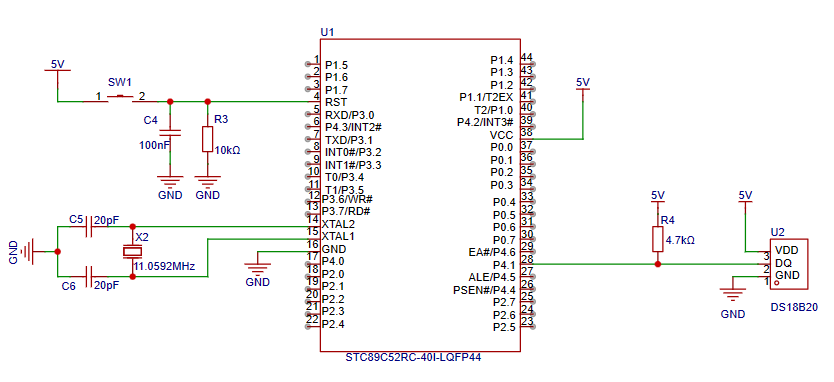
三、多个18B20温度传感器1602液晶显示。一、一个18B20温度传感器数码管显示。二、一个18B20温度传感器液晶显示。程序实例3:1602驱动。

比如,如果加速度计的带宽是100Hz,意味着它能准确测量频率在0到100Hz之间的振动或加速度变化,超过这个频率的信号可能会被衰减或无法检测。高带宽的加速度计适合测量快速变化的振动,如机械冲击或高频机械振动,而低带宽的可能更适合静态或缓慢变化的加速度测量,比如倾角检测。噪声通常指的是传感器输出中的随机波动,加速度计的噪声是衡量其输出信号中随机波动的关键指标,直接影响测量精度。数字输出的位数(如 8
二、DS18B20控制。一、1-wire时序。
拉普拉斯提取边缘属于使用二阶导提取边缘,它是一种各向同性的边缘提取算子。而像 sobel 等,它们在提取 x、y 方向的边缘都是使用不同的算子来实现的。我们在使用拉普拉斯算子提取边缘之前,先使用高斯平滑图像,这一过程就是 Laplacian-Gauss(LOG)算子。它把的高斯平滑滤波器和 Laplacian 锐化滤波器结合了起来,先平滑掉噪声,再进行边缘检测,所以效果会更好。对图像中的阶跃性边缘

【代码】PID控制算法:2、Derivative Kick(微分冲击)

高斯滤波是一种线性平滑滤波技术,主要用于消除图像中的高斯噪声,广泛应用于图像处理的减噪过程中。 高斯滤波通过对整幅图像进行加权平均,使每一个像素点的值由其本身和邻域内的其他像素值经过加权平均后得到。其具体操作是使用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
其基本原理是用一个给定的窗口覆盖图像中的每一个像素点,将窗口内的像素值求平均值,然后用这个平均值代替原来的像素值。一个3*3的像素矩阵,灰度值分别是2、2、3、 7、 6、 8、 7、 6、 8,他们的平均值是5.44,四舍五入取5,目标像素的灰度值6就改为5。3、传感器数据处理:均值滤波器可以用于传感器数据的平滑处理,去除数据中的噪声等。2、缺点:均值滤波器容易使图像失真,无法保留图像的细节。2
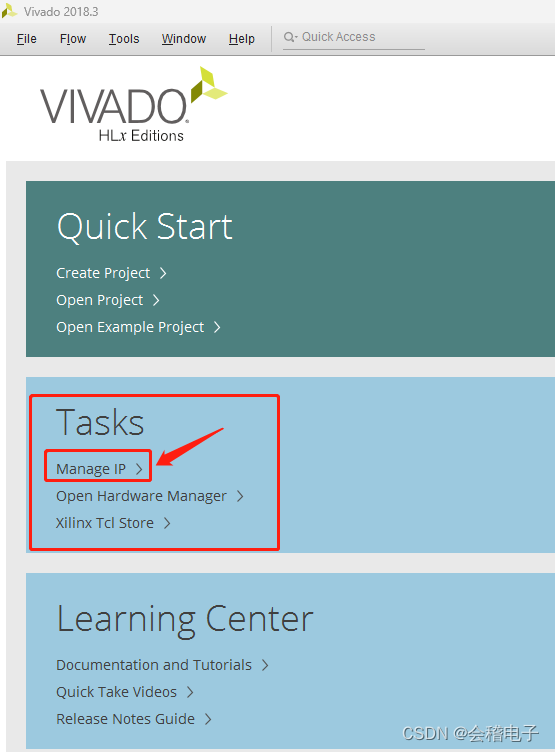
3、在弹出的界面中进行IP核的属性配置,修改系所属的器件和保存路径,其他的保持默认就行,点击Finish,就开始自动的生成IP核的工程了。12.以上只是创建了IP核,里面还是空的,需要进行编辑,点击选中创建的IP核,右击,在弹框中选择Edit in IP Packager。7、在弹出的界面中,进行封装IP的选择,或者创建一个带AXI4接口的IP核,这里选择AXI4-Stream接口的IP核。8、在
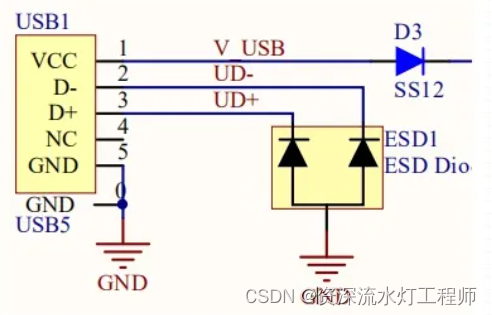
人的身上就带有很高的静电电压尤其是在冬天,人体的静电高达几千甚至上万伏。TVS二极管的一般是单个二极管,2个引脚的封装形式,体积比较大,只能对单一电路进行防护。ESD二极管的功率普遍都比较低,选型的时候主要看的是他的抗静电等级。TVS二极管的功率相对更高。ESD 二极管的结电容比较低,一般是几个pf,静电防护的前提条件就要求其电容值要足够地低。TVS二极管与ESD二极管防护原理是一样的,都是防止瞬